
 | ||
In the field of complex analysis in mathematics, the Cauchy–Riemann equations, named after Augustin Cauchy and Bernhard Riemann, consist of a system of two partial differential equations which, together with certain continuity and differentiability criteria, form a necessary and sufficient condition for a complex function to be complex differentiable, that is, holomorphic. This system of equations first appeared in the work of Jean le Rond d'Alembert (d'Alembert 1752). Later, Leonhard Euler connected this system to the analytic functions (Euler 1797). Cauchy (1814) then used these equations to construct his theory of functions. Riemann's dissertation (Riemann 1851) on the theory of functions appeared in 1851.
Contents
- Simple example
- Interpretation and reformulation
- Conformal mappings
- Complex differentiability
- Independence of the complex conjugate
- Physical interpretation
- Harmonic vector field
- Preservation of complex structure
- Other representations
- Goursats theorem and its generalizations
- Several variables
- Bcklund transform
- Definition in Clifford algebra
- Conformal mappings in higher dimensions
- References
The Cauchy–Riemann equations on a pair of real-valued functions of two real variables u(x,y) and v(x,y) are the two equations:
Typically u and v are taken to be the real and imaginary parts respectively of a complex-valued function of a single complex variable z = x + iy, f(x + iy) = u(x,y) + iv(x,y). Suppose that u and v are real-differentiable at a point in an open subset of C (C is the set of complex numbers), which can be considered as functions from R2 to R. This implies that the partial derivatives of u and v exist (although they need not be continuous) and we can approximate small variations of f linearly. Then f = u + iv is complex-differentiable at that point if and only if the partial derivatives of u and v satisfy the Cauchy–Riemann equations (1a) and (1b) at that point. The sole existence of partial derivatives satisfying the Cauchy–Riemann equations is not enough to ensure complex differentiability at that point. It is necessary that u and v be real differentiable, which is a stronger condition than the existence of the partial derivatives, but it is not necessary that these partial derivatives be continuous.
Holomorphy is the property of a complex function of being differentiable at every point of an open and connected subset of C (this is called a domain in C). Consequently, we can assert that a complex function f, whose real and imaginary parts u and v are real-differentiable functions, is holomorphic if and only if, equations (1a) and (1b) are satisfied throughout the domain we are dealing with. Holomorphic functions are analytic and vice versa. This means that, in complex analysis, a function that is complex-differentiable in a whole domain (holomorphic) is the same as an analytic function. This is not true for real differentiable functions.
Simple example
Suppose that z = x + iy. A complex-valued function f(z) = z2 is differentiable at any point z in the complex plane.
The real part u(x, y) and the imaginary part v(x, y) of f(z) are
respectively. The partial derivatives of these are
These partial derivatives have following relationships:
Thus this complex-valued function f(z) satisfies the Cauchy–Riemann equations.
Interpretation and reformulation
The equations are one way of looking at the condition on a function to be differentiable in the sense of complex analysis: in other words they encapsulate the notion of function of a complex variable by means of conventional differential calculus. In the theory there are several other major ways of looking at this notion, and the translation of the condition into other language is often needed.
Conformal mappings
First, the Cauchy–Riemann equations may be written in complex form
(2)In this form, the equations correspond structurally to the condition that the Jacobian matrix is of the form
where
Moreover, because the composition of a conformal transformation with another conformal transformation is also conformal, the composition of a solution of the Cauchy–Riemann equations with a conformal map must itself solve the Cauchy–Riemann equations. Thus the Cauchy–Riemann equations are conformally invariant.
Complex differentiability
Suppose that
is a function of a complex number z. Then the complex derivative of f at a point z0 is defined by
provided this limit exists.
If this limit exists, then it may be computed by taking the limit as h → 0 along the real axis or imaginary axis; in either case it should give the same result. Approaching along the real axis, one finds
On the other hand, approaching along the imaginary axis,
The equality of the derivative of f taken along the two axis is
which are the Cauchy–Riemann equations (2) at the point z0.
Conversely, if f : C → C is a function which is differentiable when regarded as a function on R2, then f is complex differentiable if and only if the Cauchy–Riemann equations hold. In other words, if u and v are real-differentiable functions of two real variables, obviously u + iv is a (complex-valued) real-differentiable function, but u + iv is complex-differentiable if and only if the Cauchy–Riemann equations hold.
Indeed, following Rudin (1966), suppose f is a complex function defined in an open set Ω ⊂ C. Then, writing z = x + iy for every z ∈ Ω, one can also regard Ω as an open subset of R2, and f as a function of two real variables x and y, which maps Ω ⊂ R2 to C. We consider the Cauchy–Riemann equations at z = z0. So assume f is differentiable at z0, as a function of two real variables from Ω to C. This is equivalent to the existence of the following linear approximation
where z = x + iy and η(Δz) → 0 as Δz → 0. Since
Defining the two Wirtinger derivatives as
in the limit
For real values of z, we have
Independence of the complex conjugate
The above proof suggests another interpretation of the Cauchy–Riemann equations. The complex conjugate of z, denoted
for real x and y. The Cauchy–Riemann equations can then be written as a single equation
(3)by using the Wirtinger derivative with respect to the conjugate variable. In this form, the Cauchy–Riemann equations can be interpreted as the statement that f is independent of the variable
Physical interpretation
A standard physical interpretation of the Cauchy–Riemann equations going back to Riemann's work on function theory (see Klein 1893) is that u represents a velocity potential of an incompressible steady fluid flow in the plane, and v is its stream function. Suppose that the pair of (twice continuously differentiable) functions
By differentiating the Cauchy–Riemann equations a second time, one shows that u solves Laplace's equation:
That is, u is a harmonic function. This means that the divergence of the gradient is zero, and so the fluid is incompressible.
The function v also satisfies the Laplace equation, by a similar analysis. Also, the Cauchy–Riemann equations imply that the dot product
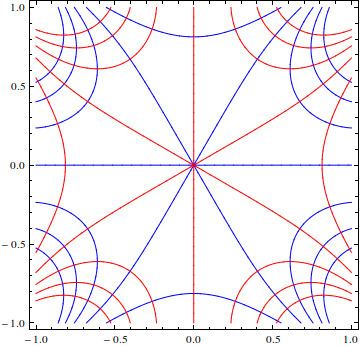
A holomorphic function can therefore be visualized by plotting the two families of level curves
Harmonic vector field
Another interpretation of the Cauchy–Riemann equations can be found in Pólya & Szegő (1978). Suppose that u and v satisfy the Cauchy–Riemann equations in an open subset of R2, and consider the vector field
regarded as a (real) two-component vector. Then the second Cauchy–Riemann equation (1b) asserts that
The first Cauchy–Riemann equation (1a) asserts that the vector field is solenoidal (or divergence-free):
Owing respectively to Green's theorem and the divergence theorem, such a field is necessarily a conservative one, and it is free from sources or sinks, having net flux equal to zero through any open domain without holes. (These two observations combine as real and imaginary parts in Cauchy's integral theorem.) In fluid dynamics, such a vector field is a potential flow (Chanson 2007). In magnetostatics, such vector fields model static magnetic fields on a region of the plane containing no current. In electrostatics, they model static electric fields in a region of the plane containing no electric charge.
This interpretation can equivalently be restated in the language of differential forms. The pair u,v satisfy the Cauchy–Riemann equations if and only if the one-form
Preservation of complex structure
Another formulation of the Cauchy–Riemann equations involves the complex structure in the plane, given by
This is a complex structure in the sense that the square of J is the negative of the 2×2 identity matrix:
The Jacobian matrix of f is the matrix of partial derivatives
Then the pair of functions u, v satisfies the Cauchy–Riemann equations if and only if the 2×2 matrix Df commutes with J (Kobayashi & Nomizu 1969, Proposition IX.2.2)
This interpretation is useful in symplectic geometry, where it is the starting point for the study of pseudoholomorphic curves.
Other representations
Other representations of the Cauchy–Riemann equations occasionally arise in other coordinate systems. If (1a) and (1b) hold for a differentiable pair of functions u and v, then so do
for any coordinate system (n(x, y), s(x, y)) such that the pair (∇n, ∇s) is orthonormal and positively oriented. As a consequence, in particular, in the system of coordinates given by the polar representation z = r eiθ, the equations then take the form
Combining these into one equation for f gives
The inhomogeneous Cauchy–Riemann equations consist of the two equations for a pair of unknown functions u(x,y) and v(x,y) of two real variables
for some given functions α(x,y) and β(x,y) defined in an open subset of R2. These equations are usually combined into a single equation
where f = u + iv and φ = (α + iβ)/2.
If φ is Ck, then the inhomogeneous equation is explicitly solvable in any bounded domain D, provided φ is continuous on the closure of D. Indeed, by the Cauchy integral formula,
for all ζ ∈ D.
Goursat's theorem and its generalizations
Suppose that f = u + iv is a complex-valued function which is differentiable as a function f : R2 → R2. Then Goursat's theorem asserts that f is analytic in an open complex domain Ω if and only if it satisfies the Cauchy–Riemann equation in the domain (Rudin 1966, Theorem 11.2). In particular, continuous differentiability of f need not be assumed (Dieudonné 1969, §9.10, Ex. 1).
The hypotheses of Goursat's theorem can be weakened significantly. If f = u + iv is continuous in an open set Ω and the partial derivatives of f with respect to x and y exist in Ω, and satisfy the Cauchy–Riemann equations throughout Ω, then f is holomorphic (and thus analytic). This result is the Looman–Menchoff theorem.
The hypothesis that f obey the Cauchy–Riemann equations throughout the domain Ω is essential. It is possible to construct a continuous function satisfying the Cauchy–Riemann equations at a point, but which is not analytic at the point (e.g., f(z) = z5 / |z|4). Similarly, some additional assumption is needed besides the Cauchy–Riemann equations (such as continuity), as the following example illustrates (Looman 1923, p. 107)
which satisfies the Cauchy–Riemann equations everywhere, but fails to be continuous at z = 0.
Nevertheless, if a function satisfies the Cauchy–Riemann equations in an open set in a weak sense, then the function is analytic. More precisely (Gray & Morris 1978, Theorem 9):
This is in fact a special case of a more general result on the regularity of solutions of hypoelliptic partial differential equations.
Several variables
There are Cauchy–Riemann equations, appropriately generalized, in the theory of several complex variables. They form a significant overdetermined system of PDEs. As often formulated, the d-bar operator
annihilates holomorphic functions. This generalizes most directly the formulation
where
Bäcklund transform
Viewed as conjugate harmonic functions, the Cauchy–Riemann equations are a simple example of a Bäcklund transform. More complicated, generally non-linear Bäcklund transforms, such as in the sine-Gordon equation, are of great interest in the theory of solitons and integrable systems.
Definition in Clifford algebra
In Clifford algebra the complex number
Grouping by
Henceforth in traditional notation:
Conformal mappings in higher dimensions
Let Ω be an open set in the Euclidean space Rn. The equation for an orientation-preserving mapping
where Df is the Jacobian matrix, with transpose