
 | ||
A magnetic field is the magnetic effect of electric currents and magnetic materials. The magnetic field at any given point is specified by both a direction and a magnitude (or strength); as such it is a vector field. The term is used for two distinct but closely related fields denoted by the symbols B and H, where H is measured in units of amperes per meter (symbol: A⋅m−1 or A/m) in the SI. B is measured in teslas (symbol: T) and newtons per meter per ampere (symbol: N⋅m−1⋅A−1 or N/(m⋅A)) in the SI. B is most commonly defined in terms of the Lorentz force it exerts on moving electric charges.
Contents
- History
- The B field
- The H field
- Units
- Measurement
- Magnetic field lines
- Magnetic field and permanent magnets
- Magnetic field of permanent magnets
- Magnetic pole model and the H field
- Amperian loop model and the B field
- Force between magnets
- Magnetic torque on permanent magnets
- Magnetic field and electric currents
- Magnetic field due to moving charges and electric currents
- Force on a charged particle
- Force on current carrying wire
- Direction of force
- Relation between H and B
- Magnetization
- H field and magnetic materials
- Magnetism
- Energy stored in magnetic fields
- Faradays Law Electric force due to a changing B field
- Maxwells correction to Ampres Law The magnetic field due to a changing electric field
- Maxwells equations
- Electric and magnetic fields different aspects of the same phenomenon
- Magnetic vector potential
- Quantum electrodynamics
- Earths magnetic field
- Rotating magnetic fields
- Hall effect
- Magnetic circuits
- Magnetic field shape descriptions
- Magnetic dipoles
- Magnetic monopole hypothetical
- References
Magnetic fields can be produced by moving electric charges and the intrinsic magnetic moments of elementary particles associated with a fundamental quantum property, their spin. In special relativity, electric and magnetic fields are two interrelated aspects of a single object, called the electromagnetic tensor; the split of this tensor into electric and magnetic fields depends on the relative velocity of the observer and charge. In quantum physics, the electromagnetic field is quantized and electromagnetic interactions result from the exchange of photons.
In everyday life, magnetic fields are most often encountered as a force created by permanent magnets, which pull on ferromagnetic materials such as iron, cobalt, or nickel, and attract or repel other magnets. Magnetic fields are widely used throughout modern technology, particularly in electrical engineering and electromechanics. The Earth produces its own magnetic field, which is important in navigation, and it shields the Earth's atmosphere from solar wind. Rotating magnetic fields are used in both electric motors and generators. Magnetic forces give information about the charge carriers in a material through the Hall effect. The interaction of magnetic fields in electric devices such as transformers is studied in the discipline of magnetic circuits.
History
Although magnets and magnetism were known much earlier, the study of magnetic fields began in 1269 when French scholar Petrus Peregrinus de Maricourt mapped out the magnetic field on the surface of a spherical magnet using iron needles. Noting that the resulting field lines crossed at two points he named those points 'poles' in analogy to Earth's poles. He also clearly articulated the principle that magnets always have both a north and south pole, no matter how finely one slices them.
Almost three centuries later, William Gilbert of Colchester replicated Petrus Peregrinus' work and was the first to state explicitly that Earth is a magnet. Published in 1600, Gilbert's work, De Magnete, helped to establish magnetism as a science.
In 1750, John Michell stated that magnetic poles attract and repel in accordance with an inverse square law. Charles-Augustin de Coulomb experimentally verified this in 1785 and stated explicitly that the north and south poles cannot be separated. Building on this force between poles, Siméon Denis Poisson (1781–1840) created the first successful model of the magnetic field, which he presented in 1824. In this model, a magnetic H-field is produced by 'magnetic poles' and magnetism is due to small pairs of north/south magnetic poles.
Three discoveries challenged this foundation of magnetism, though. First, in 1819, Hans Christian Ørsted discovered that an electric current generates a magnetic field encircling it. Then in 1820, André-Marie Ampère showed that parallel wires having currents in the same direction attract one another. Finally, Jean-Baptiste Biot and Félix Savart discovered the Biot–Savart law in 1820, which correctly predicts the magnetic field around any current-carrying wire.
Extending these experiments, Ampère published his own successful model of magnetism in 1825. In it, he showed the equivalence of electrical currents to magnets and proposed that magnetism is due to perpetually flowing loops of current instead of the dipoles of magnetic charge in Poisson's model. This has the additional benefit of explaining why magnetic charge can not be isolated. Further, Ampère derived both Ampère's force law describing the force between two currents and Ampère's law, which, like the Biot–Savart law, correctly described the magnetic field generated by a steady current. Also in this work, Ampère introduced the term electrodynamics to describe the relationship between electricity and magnetism.
In 1831, Michael Faraday discovered electromagnetic induction when he found that a changing magnetic field generates an encircling electric field. He described this phenomenon in what is known as Faraday's law of induction. Later, Franz Ernst Neumann proved that, for a moving conductor in a magnetic field, induction is a consequence of Ampère's force law. In the process he introduced the magnetic vector potential, which was later shown to be equivalent to the underlying mechanism proposed by Faraday.
In 1850, Lord Kelvin, then known as William Thomson, distinguished between two magnetic fields now denoted H and B. The former applied to Poisson's model and the latter to Ampère's model and induction. Further, he derived how H and B relate to each other.
The reason H and B are used for the two magnetic fields has been a source of some debate among science historians. Most agree that Kelvin avoided M to prevent confusion with the SI fundamental unit of length, the Metre, abbreviated "m". Others believe the choices were purely random.
Between 1861 and 1865, James Clerk Maxwell developed and published Maxwell's equations, which explained and united all of classical electricity and magnetism. The first set of these equations was published in a paper entitled On Physical Lines of Force in 1861. These equations were valid although incomplete. Maxwell completed his set of equations in his later 1865 paper A Dynamical Theory of the Electromagnetic Field and demonstrated the fact that light is an electromagnetic wave. Heinrich Hertz experimentally confirmed this fact in 1887.
The twentieth century extended electrodynamics to include relativity and quantum mechanics. Albert Einstein, in his paper of 1905 that established relativity, showed that both the electric and magnetic fields are part of the same phenomena viewed from different reference frames. (See moving magnet and conductor problem for details about the thought experiment that eventually helped Albert Einstein to develop special relativity.) Finally, the emergent field of quantum mechanics was merged with electrodynamics to form quantum electrodynamics (QED).
The B-field
The magnetic field can be defined in several equivalent ways based on the effects it has on its environment.
Often the magnetic field is defined by the force it exerts on a moving charged particle. It is known from experiments in electrostatics that a particle of charge q in an electric field E experiences a force F = qE. However, in other situations, such as when a charged particle moves in the vicinity of a current-carrying wire, the force also depends on the velocity of that particle. Fortunately, the velocity dependent portion can be separated out such that the force on the particle satisfies the Lorentz force law,
Here v is the particle's velocity and × denotes the cross product. The vector B is termed the magnetic field, and it is defined as the vector field necessary to make the Lorentz force law correctly describe the motion of a charged particle. This definition allows the determination of B in the following way
[T]he command, "Measure the direction and magnitude of the vector B at such and such a place," calls for the following operations: Take a particle of known charge q. Measure the force on q at rest, to determine E. Then measure the force on the particle when its velocity is v; repeat with v in some other direction. Now find a B that makes the Lorentz force law fit all these results—that is the magnetic field at the place in question.
Alternatively, the magnetic field can be defined in terms of the torque it produces on a magnetic dipole (see magnetic torque on permanent magnets below).
The H-field
In addition to B, there is a quantity H, which is also sometimes called the magnetic field. In a vacuum, B and H are proportional to each other, with the multiplicative constant depending on the physical units. Inside a material they are different (see H and B inside and outside of magnetic materials). The term "magnetic field" is historically reserved for H while using other terms for B. Informally, though, and formally for some recent textbooks mostly in physics, the term 'magnetic field' is used to describe B as well as or in place of H. There are many alternative names for both (see sidebar).
Units
In SI units, B is measured in teslas (symbol: T) and correspondingly ΦB (magnetic flux) is measured in webers (symbol: Wb) so that a flux density of 1 Wb/m2 is 1 tesla. The SI unit of tesla is equivalent to (newton·second)/(coulomb·metre). In Gaussian-cgs units, B is measured in gauss (symbol: G). (The conversion is 1 T = 10,000 G.) One nanotesla is also called a gamma (symbol: γ). The H-field is measured in amperes per metre (A/m) in SI units, and in oersteds (Oe) in cgs units.
Measurement
The precision attained for a magnetic field measurement for Gravity Probe B experiment is 5 attoteslas (6982500000000000000♠5×10−18 T); the largest magnetic field produced in a laboratory is 2.8 kT (VNIIEF in Sarov, Russia, 1998). The magnetic field of some astronomical objects such as magnetars are much higher; magnetars range from 0.1 to 100 GT (108 to 1011 T). See orders of magnitude (magnetic field).
Devices used to measure the local magnetic field are called magnetometers. Important classes of magnetometers include using induction magnetometer (or search-coil magnetometer) which measure only varying magnetic field, rotating coil magnetometer, Hall effect magnetometers, NMR magnetometers, SQUID magnetometers, and fluxgate magnetometers. The magnetic fields of distant astronomical objects are measured through their effects on local charged particles. For instance, electrons spiraling around a field line produce synchrotron radiation that is detectable in radio waves.
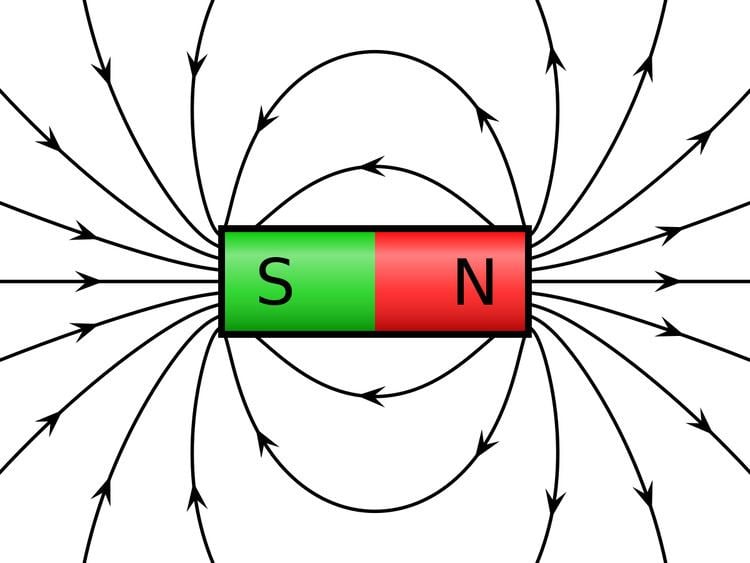
Magnetic field lines
Mapping the magnetic field of an object is simple in principle. First, measure the strength and direction of the magnetic field at a large number of locations (or at every point in space). Then, mark each location with an arrow (called a vector) pointing in the direction of the local magnetic field with its magnitude proportional to the strength of the magnetic field.
An alternative method to map the magnetic field is to 'connect' the arrows to form magnetic field lines. The direction of the magnetic field at any point is parallel to the direction of nearby field lines, and the local density of field lines can be made proportional to its strength.
Magnetic field lines are like streamlines in fluid flow, in that they represent something continuous, and a different resolution would show more or fewer lines. An advantage of using magnetic field lines as a representation is that many laws of magnetism (and electromagnetism) can be stated completely and concisely using simple concepts such as the 'number' of field lines through a surface. These concepts can be quickly 'translated' to their mathematical form. For example, the number of field lines through a given surface is the surface integral of the magnetic field.
Various phenomena have the effect of "displaying" magnetic field lines as though the field lines were physical phenomena. For example, iron filings placed in a magnetic field, form lines that correspond to 'field lines'. Magnetic field "lines" are also visually displayed in polar auroras, in which plasma particle dipole interactions create visible streaks of light that line up with the local direction of Earth's magnetic field.
Field lines can be used as a qualitative tool to visualize magnetic forces. In ferromagnetic substances like iron and in plasmas, magnetic forces can be understood by imagining that the field lines exert a tension, (like a rubber band) along their length, and a pressure perpendicular to their length on neighboring field lines. 'Unlike' poles of magnets attract because they are linked by many field lines; 'like' poles repel because their field lines do not meet, but run parallel, pushing on each other. The rigorous form of this concept is the electromagnetic stress–energy tensor.
Magnetic field and permanent magnets
Permanent magnets are objects that produce their own persistent magnetic fields. They are made of ferromagnetic materials, such as iron and nickel, that have been magnetized, and they have both a north and a south pole.
Magnetic field of permanent magnets
The magnetic field of permanent magnets can be quite complicated, especially near the magnet. The magnetic field of a small straight magnet is proportional to the magnet's strength (called its magnetic dipole moment m). The equations are non-trivial and also depend on the distance from the magnet and the orientation of the magnet. For simple magnets, m points in the direction of a line drawn from the south to the north pole of the magnet. Flipping a bar magnet is equivalent to rotating its m by 180 degrees.
The magnetic field of larger magnets can be obtained by modelling them as a collection of a large number of small magnets called dipoles each having their own m. The magnetic field produced by the magnet then is the net magnetic field of these dipoles. And, any net force on the magnet is a result of adding up the forces on the individual dipoles.
There are two competing models for the nature of these dipoles. These two models produce two different magnetic fields, H and B. Outside a material, though, the two are identical (to a multiplicative constant) so that in many cases the distinction can be ignored. This is particularly true for magnetic fields, such as those due to electric currents, that are not generated by magnetic materials.
Magnetic pole model and the H-field
It is sometimes useful to model the force and torques between two magnets as due to magnetic poles repelling or attracting each other in the same manner as the Coulomb force between electric charges. This is called the Gilbert model of magnetism, after William Gilbert. In this model, a magnetic H-field is produced by magnetic charges that are 'smeared' around each pole. These magnetic charges are in fact related to the magnetization field M.
The H-field, therefore, is analogous to the electric field E, which starts at a positive electric charge and ends at a negative electric charge. Near the north pole, therefore, all H-field lines point away from the north pole (whether inside the magnet or out) while near the south pole (whether inside the magnet or out) all H-field lines point toward the south pole. A north pole, then, feels a force in the direction of the H-field while the force on the south pole is opposite to the H-field.
In the magnetic pole model, the elementary magnetic dipole m is formed by two opposite magnetic poles of pole strength qm separated by a small distance vector d, such that m = qm d. The magnetic pole model predicts correctly the field H both inside and outside magnetic materials, in particular the fact that H is opposite to the magnetization field M inside a permanent magnet.
Since it is based on the fictitious idea of a magnetic charge density, the Gilbert model has limitations. Magnetic poles cannot exist apart from each other as electric charges can, but always come in north/south pairs. If a magnetized object is divided in half, a new pole appears on the surface of each piece, so each has a pair of complementary poles. The magnetic pole model does not account for magnetism that is produced by electric currents.
Amperian loop model and the B-field
After Ørsted discovered that electric currents produce a magnetic field and Ampere discovered that electric currents attracted and repelled each other similar to magnets, it was natural to hypothesize that all magnetic fields are due to electric current loops. In this model developed by Ampere, the elementary magnetic dipole that makes up all magnets is a sufficiently small Amperian loop of current I. The dipole moment of this loop is m = IA where A is the area of the loop.
These magnetic dipoles produce a magnetic B-field. One important property of the B-field produced this way is that magnetic B-field lines neither start nor end (mathematically, B is a solenoidal vector field); a field line either extends to infinity or wraps around to form a closed curve. To date no exception to this rule has been found. (See magnetic monopole below.) Magnetic field lines exit a magnet near its north pole and enter near its south pole, but inside the magnet B-field lines continue through the magnet from the south pole back to the north. If a B-field line enters a magnet somewhere it has to leave somewhere else; it is not allowed to have an end point. Magnetic poles, therefore, always come in N and S pairs.
More formally, since all the magnetic field lines that enter any given region must also leave that region, subtracting the 'number' of field lines that enter the region from the number that exit gives identically zero. Mathematically this is equivalent to:
where the integral is a surface integral over the closed surface S (a closed surface is one that completely surrounds a region with no holes to let any field lines escape). Since dA points outward, the dot product in the integral is positive for B-field pointing out and negative for B-field pointing in.
There is also a corresponding differential form of this equation covered in Maxwell's equations below.
Force between magnets
The force between two small magnets is quite complicated and depends on the strength and orientation of both magnets and the distance and direction of the magnets relative to each other. The force is particularly sensitive to rotations of the magnets due to magnetic torque. The force on each magnet depends on its magnetic moment and the magnetic field of the other.
To understand the force between magnets, it is useful to examine the magnetic pole model given above. In this model, the H-field of one magnet pushes and pulls on both poles of a second magnet. If this H-field is the same at both poles of the second magnet then there is no net force on that magnet since the force is opposite for opposite poles. If, however, the magnetic field of the first magnet is nonuniform (such as the H near one of its poles), each pole of the second magnet sees a different field and is subject to a different force. This difference in the two forces moves the magnet in the direction of increasing magnetic field and may also cause a net torque.
This is a specific example of a general rule that magnets are attracted (or repulsed depending on the orientation of the magnet) into regions of higher magnetic field. Any non-uniform magnetic field, whether caused by permanent magnets or electric currents, exerts a force on a small magnet in this way.
The details of the Amperian loop model are different and more complicated but yield the same result: that magnetic dipoles are attracted/repelled into regions of higher magnetic field. Mathematically, the force on a small magnet having a magnetic moment m due to a magnetic field B is:
where the gradient ∇ is the change of the quantity m · B per unit distance and the direction is that of maximum increase of m · B. To understand this equation, note that the dot product m · B = mBcos(θ), where m and B represent the magnitude of the m and B vectors and θ is the angle between them. If m is in the same direction as B then the dot product is positive and the gradient points 'uphill' pulling the magnet into regions of higher B-field (more strictly larger m · B). This equation is strictly only valid for magnets of zero size, but is often a good approximation for not too large magnets. The magnetic force on larger magnets is determined by dividing them into smaller regions each having their own m then summing up the forces on each of these very small regions.
Magnetic torque on permanent magnets
If two like poles of two separate magnets are brought near each other, and one of the magnets is allowed to turn, it promptly rotates to align itself with the first. In this example, the magnetic field of the stationary magnet creates a magnetic torque on the magnet that is free to rotate. This magnetic torque τ tends to align a magnet's poles with the magnetic field lines. A compass, therefore, turns to align itself with Earth's magnetic field.
Magnetic torque is used to drive electric motors. In one simple motor design, a magnet is fixed to a freely rotating shaft and subjected to a magnetic field from an array of electromagnets. By continuously switching the electric current through each of the electromagnets, thereby flipping the polarity of their magnetic fields, like poles are kept next to the rotor; the resultant torque is transferred to the shaft. See Rotating magnetic fields below.
As is the case for the force between magnets, the magnetic pole model leads more readily to the correct equation. Here, two equal and opposite magnetic charges experiencing the same H also experience equal and opposite forces. Since these equal and opposite forces are in different locations, this produces a torque proportional to the distance (perpendicular to the force) between them. With the definition of m as the pole strength times the distance between the poles, this leads to τ = μ0mHsinθ, where μ0 is a constant called the vacuum permeability, measuring 6993400000000000000♠4π×10−7 V·s/(A·m) and θ is the angle between H and m.
The Amperian loop model also predicts the same magnetic torque. Here, it is the B field interacting with the Amperian current loop through a Lorentz force described below. Again, the results are the same although the models are completely different.
Mathematically, the torque τ on a small magnet is proportional both to the applied magnetic field and to the magnetic moment m of the magnet:
where × represents the vector cross product. Note that this equation includes all of the qualitative information included above. There is no torque on a magnet if m is in the same direction as the magnetic field. (The cross product is zero for two vectors that are in the same direction.) Further, all other orientations feel a torque that twists them toward the direction of magnetic field.
Magnetic field and electric currents
Currents of electric charges both generate a magnetic field and feel a force due to magnetic B-fields.
Magnetic field due to moving charges and electric currents
All moving charged particles produce magnetic fields. Moving point charges, such as electrons, produce complicated but well known magnetic fields that depend on the charge, velocity, and acceleration of the particles.
Magnetic field lines form in concentric circles around a cylindrical current-carrying conductor, such as a length of wire. The direction of such a magnetic field can be determined by using the "right hand grip rule" (see figure at right). The strength of the magnetic field decreases with distance from the wire. (For an infinite length wire the strength is inversely proportional to the distance.)
Bending a current-carrying wire into a loop concentrates the magnetic field inside the loop while weakening it outside. Bending a wire into multiple closely spaced loops to form a coil or "solenoid" enhances this effect. A device so formed around an iron core may act as an electromagnet, generating a strong, well-controlled magnetic field. An infinitely long cylindrical electromagnet has a uniform magnetic field inside, and no magnetic field outside. A finite length electromagnet produces a magnetic field that looks similar to that produced by a uniform permanent magnet, with its strength and polarity determined by the current flowing through the coil.
The magnetic field generated by a steady current I (a constant flow of electric charges, in which charge neither accumulates nor is depleted at any point) is described by the Biot–Savart law:
where the integral sums over the wire length where vector dℓ is the vector line element with direction in the same sense as the current I, μ0 is the magnetic constant, r is the distance between the location of dℓ and the location where the magnetic field is calculated, and r̂ is a unit vector in the direction of r. In the case of a sufficiently long wire, this becomes:
where r is the distance from the wire.
A slightly more general way of relating the current
where the line integral is over any arbitrary loop and
In a modified form that accounts for time varying electric fields, Ampère's law is one of four Maxwell's equations that describe electricity and magnetism.
Force on a charged particle
A charged particle moving in a B-field experiences a sideways force that is proportional to the strength of the magnetic field, the component of the velocity that is perpendicular to the magnetic field and the charge of the particle. This force is known as the Lorentz force, and is given by
where F is the force, q is the electric charge of the particle, v is the instantaneous velocity of the particle, and B is the magnetic field (in teslas).
The Lorentz force is always perpendicular to both the velocity of the particle and the magnetic field that created it. When a charged particle moves in a static magnetic field, it traces a helical path in which the helix axis is parallel to the magnetic field, and in which the speed of the particle remains constant. Because the magnetic force is always perpendicular to the motion, the magnetic field can do no work on an isolated charge. It can only do work indirectly, via the electric field generated by a changing magnetic field. It is often claimed that the magnetic force can do work to a non-elementary magnetic dipole, or to charged particles whose motion is constrained by other forces, but this is incorrect because the work in those cases is performed by the electric forces of the charges deflected by the magnetic field.
Force on current-carrying wire
The force on a current carrying wire is similar to that of a moving charge as expected since a charge carrying wire is a collection of moving charges. A current-carrying wire feels a force in the presence of a magnetic field. The Lorentz force on a macroscopic current is often referred to as the Laplace force. Consider a conductor of length ℓ, cross section A, and charge q due to electric current i. If this conductor is placed in a magnetic field of magnitude B that makes an angle θ with the velocity of charges in the conductor, the force exerted on a single charge q is
so, for N charges where
the force exerted on the conductor is
where i = nqvA.
Direction of force
The direction of force on a charge or a current can be determined by a mnemonic known as the right-hand rule (see the figure). Using the right hand and pointing the thumb in the direction of the moving positive charge or positive current and the fingers in the direction of the magnetic field the resulting force on the charge points outwards from the palm. The force on a negatively charged particle is in the opposite direction. If both the speed and the charge are reversed then the direction of the force remains the same. For that reason a magnetic field measurement (by itself) cannot distinguish whether there is a positive charge moving to the right or a negative charge moving to the left. (Both of these cases produce the same current.) On the other hand, a magnetic field combined with an electric field can distinguish between these, see Hall effect below.
An alternative mnemonic to the right hand rule Flemings's left hand rule.
Relation between H and B
The formulas derived for the magnetic field above are correct when dealing with the entire current. A magnetic material placed inside a magnetic field, though, generates its own bound current, which can be a challenge to calculate. (This bound current is due to the sum of atomic sized current loops and the spin of the subatomic particles such as electrons that make up the material.) The H-field as defined above helps factor out this bound current; but to see how, it helps to introduce the concept of magnetization first.
Magnetization
The magnetization vector field M represents how strongly a region of material is magnetized. It is defined as the net magnetic dipole moment per unit volume of that region. The magnetization of a uniform magnet is therefore a material constant, equal to the magnetic moment m of the magnet divided by its volume. Since the SI unit of magnetic moment is A⋅m2, the SI unit of magnetization M is ampere per meter, identical to that of the H-field.
The magnetization M field of a region points in the direction of the average magnetic dipole moment in that region. Magnetization field lines, therefore, begin near the magnetic south pole and ends near the magnetic north pole. (Magnetization does not exist outside of the magnet.)
In the Amperian loop model, the magnetization is due to combining many tiny Amperian loops to form a resultant current called bound current. This bound current, then, is the source of the magnetic B field due to the magnet. (See Magnetic dipoles below and magnetic poles vs. atomic currents for more information.) Given the definition of the magnetic dipole, the magnetization field follows a similar law to that of Ampere's law:
where the integral is a line integral over any closed loop and Ib is the 'bound current' enclosed by that closed loop.
In the magnetic pole model, magnetization begins at and ends at magnetic poles. If a given region, therefore, has a net positive 'magnetic pole strength' (corresponding to a north pole) then it has more magnetization field lines entering it than leaving it. Mathematically this is equivalent to:
where the integral is a closed surface integral over the closed surface S and qM is the 'magnetic charge' (in units of magnetic flux) enclosed by S. (A closed surface completely surrounds a region with no holes to let any field lines escape.) The negative sign occurs because the magnetization field moves from south to north.
H-field and magnetic materials
In SI units, the H-field is related to the B-field by
In terms of the H-field, Ampere's law is
where If represents the 'free current' enclosed by the loop so that the line integral of H does not depend at all on the bound currents.
For the differential equivalent of this equation see Maxwell's equations. Ampere's law leads to the boundary condition
where Kf is the surface free current density and the unit normal
Similarly, a surface integral of H over any closed surface is independent of the free currents and picks out the "magnetic charges" within that closed surface:
which does not depend on the free currents.
The H-field, therefore, can be separated into two independent parts:
where H0 is the applied magnetic field due only to the free currents and Hd is the demagnetizing field due only to the bound currents.
The magnetic H-field, therefore, re-factors the bound current in terms of "magnetic charges". The H field lines loop only around 'free current' and, unlike the magnetic B field, begins and ends near magnetic poles as well.
Magnetism
Most materials respond to an applied B-field by producing their own magnetization M and therefore their own B-field. Typically, the response is weak and exists only when the magnetic field is applied. The term magnetism describes how materials respond on the microscopic level to an applied magnetic field and is used to categorize the magnetic phase of a material. Materials are divided into groups based upon their magnetic behavior:
In the case of paramagnetism and diamagnetism, the magnetization M is often proportional to the applied magnetic field such that:
where μ is a material dependent parameter called the permeability. In some cases the permeability may be a second rank tensor so that H may not point in the same direction as B. These relations between B and H are examples of constitutive equations. However, superconductors and ferromagnets have a more complex B to H relation; see magnetic hysteresis.
Energy stored in magnetic fields
Energy is needed to generate a magnetic field both to work against the electric field that a changing magnetic field creates and to change the magnetization of any material within the magnetic field. For non-dispersive materials this same energy is released when the magnetic field is destroyed so that this energy can be modeled as being stored in the magnetic field.
For linear, non-dispersive, materials (such that B = μH where μ is frequency-independent), the energy density is:
If there are no magnetic materials around then μ can be replaced by μ0. The above equation cannot be used for nonlinear materials, though; a more general expression given below must be used.
In general, the incremental amount of work per unit volume δW needed to cause a small change of magnetic field δB is:
Once the relationship between H and B is known this equation is used to determine the work needed to reach a given magnetic state. For hysteretic materials such as ferromagnets and superconductors, the work needed also depends on how the magnetic field is created. For linear non-dispersive materials, though, the general equation leads directly to the simpler energy density equation given above.
Faraday's Law: Electric force due to a changing B-field
A changing magnetic field, such as a magnet moving through a conducting coil, generates an electric field (and therefore tends to drive a current in such a coil). This is known as Faraday's law and forms the basis of many electrical generators and electric motors.
Mathematically, Faraday's law is:
where
The negative sign represents the fact that any current generated by a changing magnetic field in a coil produces a magnetic field that opposes the change in the magnetic field that induced it. This phenomenon is known as Lenz's law.
This integral formulation of Faraday's law can be converted into a differential form, which applies under slightly different conditions. This form is covered as one of Maxwell's equations below.
Maxwell's correction to Ampère's Law: The magnetic field due to a changing electric field
Similar to the way that a changing magnetic field generates an electric field, a changing electric field generates a magnetic field. This fact is known as Maxwell's correction to Ampère's law and is applied as an additive term to Ampere's law as given above. This additional term is proportional to the time rate of change of the electric flux and is similar to Faraday's law above but with a different and positive constant out front. (The electric flux through an area is proportional to the area times the perpendicular part of the electric field.)
The full law including the correction term is known as the Maxwell–Ampère equation. It is not commonly given in integral form because the effect is so small that it can typically be ignored in most cases where the integral form is used.
The Maxwell term is critically important in the creation and propagation of electromagnetic waves. Maxwell's correction to Ampère's Law together with Faraday's law of induction describes how mutually changing electric and magnetic fields interact to sustain each other and thus to form electromagnetic waves, such as light: a changing electric field generates a changing magnetic field, which generates a changing electric field again. These, though, are usually described using the differential form of this equation given below.
Maxwell's equations
Like all vector fields, a magnetic field has two important mathematical properties that relates it to its sources. (For B the sources are currents and changing electric fields.) These two properties, along with the two corresponding properties of the electric field, make up Maxwell's Equations. Maxwell's Equations together with the Lorentz force law form a complete description of classical electrodynamics including both electricity and magnetism.
The first property is the divergence of a vector field A, ∇ · A, which represents how A 'flows' outward from a given point. As discussed above, a B-field line never starts or ends at a point but instead forms a complete loop. This is mathematically equivalent to saying that the divergence of B is zero. (Such vector fields are called solenoidal vector fields.) This property is called Gauss's law for magnetism and is equivalent to the statement that there are no isolated magnetic poles or magnetic monopoles. The electric field on the other hand begins and ends at electric charges so that its divergence is non-zero and proportional to the charge density (See Gauss's law).
The second mathematical property is called the curl, such that ∇ × A represents how A curls or 'circulates' around a given point. The result of the curl is called a 'circulation source'. The equations for the curl of B and of E are called the Ampère–Maxwell equation and Faraday's law respectively. They represent the differential forms of the integral equations given above.
The complete set of Maxwell's equations then are:
where J = complete microscopic current density and ρ is the charge density.
Technically, B is a pseudovector (also called an axial vector) due to being defined by a vector cross product. (See diagram.)
As discussed above, materials respond to an applied electric E field and an applied magnetic B field by producing their own internal 'bound' charge and current distributions that contribute to E and B but are difficult to calculate. To circumvent this problem, H and D fields are used to re-factor Maxwell's equations in terms of the free current density Jf and free charge density ρf:
These equations are not any more general than the original equations (if the 'bound' charges and currents in the material are known). They also must be supplemented by the relationship between B and H as well as that between E and D. On the other hand, for simple relationships between these quantities this form of Maxwell's equations can circumvent the need to calculate the bound charges and currents.
Electric and magnetic fields: different aspects of the same phenomenon
According to the special theory of relativity, the partition of the electromagnetic force into separate electric and magnetic components is not fundamental, but varies with the observational frame of reference: An electric force perceived by one observer may be perceived by another (in a different frame of reference) as a magnetic force, or a mixture of electric and magnetic forces.
Formally, special relativity combines the electric and magnetic fields into a rank-2 tensor, called the electromagnetic tensor. Changing reference frames mixes these components. This is analogous to the way that special relativity mixes space and time into spacetime, and mass, momentum and energy into four-momentum.
Magnetic vector potential
In advanced topics such as quantum mechanics and relativity it is often easier to work with a potential formulation of electrodynamics rather than in terms of the electric and magnetic fields. In this representation, the vector potential A, and the scalar potential φ, are defined such that:
The vector potential A may be interpreted as a generalized potential momentum per unit charge just as φ is interpreted as a generalized potential energy per unit charge.
Maxwell's equations when expressed in terms of the potentials can be cast into a form that agrees with special relativity with little effort. In relativity A together with φ forms the four-potential, analogous to the four-momentum that combines the momentum and energy of a particle. Using the four potential instead of the electromagnetic tensor has the advantage of being much simpler—and it can be easily modified to work with quantum mechanics.
Quantum electrodynamics
In modern physics, the electromagnetic field is understood to be not a classical field, but rather a quantum field; it is represented not as a vector of three numbers at each point, but as a vector of three quantum operators at each point. The most accurate modern description of the electromagnetic interaction (and much else) is quantum electrodynamics (QED), which is incorporated into a more complete theory known as the Standard Model of particle physics.
In QED, the magnitude of the electromagnetic interactions between charged particles (and their antiparticles) is computed using perturbation theory. These rather complex formulas produce a remarkable pictorial representation as Feynman diagrams in which virtual photons are exchanged.
Predictions of QED agree with experiments to an extremely high degree of accuracy: currently about 10−12 (and limited by experimental errors); for details see precision tests of QED. This makes QED one of the most accurate physical theories constructed thus far.
All equations in this article are in the classical approximation, which is less accurate than the quantum description mentioned here. However, under most everyday circumstances, the difference between the two theories is negligible.
Earth's magnetic field
The Earth's magnetic field is thought to be produced by convection currents in the outer liquid of Earth's core. The Dynamo theory proposes that these movements produce electric currents that, in turn, produce the magnetic field.
The presence of this field causes a compass, placed anywhere within it, to rotate so that the "north pole" of the magnet in the compass points roughly north, toward Earth's North Magnetic Pole. This is the traditional definition of the "north pole" of a magnet, although other equivalent definitions are also possible.
One confusion that arises from this definition is that, if Earth itself is considered as a magnet, the south pole of that magnet would be the one nearer the north magnetic pole, and vice versa. The north magnetic pole is so-named not because of the polarity of the field there but because of its geographical location. The north and south poles of a permanent magnet are so-called because they are "north-seeking" and "south-seeking", respectively.
The figure is a sketch of Earth's magnetic field represented by field lines. For most locations, the magnetic field has a significant up/down component in addition to the north/south component. (There is also an east/west component, as Earth's magnetic and geographical poles do not coincide.) The magnetic field can be visualised as a bar magnet buried deep in Earth's interior.
Earth's magnetic field is not constant—the strength of the field and the location of its poles vary. Moreover, the poles periodically reverse their orientation in a process called geomagnetic reversal. The most recent reversal occurred 780,000 years ago.
Rotating magnetic fields
The rotating magnetic field is a key principle in the operation of alternating-current motors. A permanent magnet in such a field rotates so as to maintain its alignment with the external field. This effect was conceptualized by Nikola Tesla, and later utilized in his, and others', early AC (alternating current) electric motors.
A rotating magnetic field can be constructed using two orthogonal coils with 90 degrees phase difference in their AC currents. However, in practice such a system would be supplied through a three-wire arrangement with unequal currents.
This inequality would cause serious problems in standardization of the conductor size and so, to overcome it, three-phase systems are used where the three currents are equal in magnitude and have 120 degrees phase difference. Three similar coils having mutual geometrical angles of 120 degrees create the rotating magnetic field in this case. The ability of the three-phase system to create a rotating field, utilized in electric motors, is one of the main reasons why three-phase systems dominate the world's electrical power supply systems.
Synchronous motors use DC-voltage-fed rotor windings, which lets the excitation of the machine be controlled—and induction motors use short-circuited rotors (instead of a magnet) following the rotating magnetic field of a multicoiled stator. The short-circuited turns of the rotor develop eddy currents in the rotating field of the stator, and these currents in turn move the rotor by the Lorentz force.
In 1882, Nikola Tesla identified the concept of the rotating magnetic field. In 1885, Galileo Ferraris independently researched the concept. In 1888, Tesla gained U.S. Patent 381,968 for his work. Also in 1888, Ferraris published his research in a paper to the Royal Academy of Sciences in Turin.
Hall effect
The charge carriers of a current-carrying conductor placed in a transverse magnetic field experience a sideways Lorentz force; this results in a charge separation in a direction perpendicular to the current and to the magnetic field. The resultant voltage in that direction is proportional to the applied magnetic field. This is known as the Hall effect.
The Hall effect is often used to measure the magnitude of a magnetic field. It is used as well to find the sign of the dominant charge carriers in materials such as semiconductors (negative electrons or positive holes).
Magnetic circuits
An important use of H is in magnetic circuits where B = μH inside a linear material. Here, μ is the magnetic permeability of the material. This result is similar in form to Ohm's law J = σE, where J is the current density, σ is the conductance and E is the electric field. Extending this analogy, the counterpart to the macroscopic Ohm's law (I = V⁄R) is:
where
Using this analogy it is straightforward to calculate the magnetic flux of complicated magnetic field geometries, by using all the available techniques of circuit theory.
Magnetic field shape descriptions
Magnetic dipoles
The magnetic field of a magnetic dipole is depicted in the figure. From outside, the ideal magnetic dipole is identical to that of an ideal electric dipole of the same strength. Unlike the electric dipole, a magnetic dipole is properly modeled as a current loop having a current I and an area a. Such a current loop has a magnetic moment of:
where the direction of m is perpendicular to the area of the loop and depends on the direction of the current using the right-hand rule. An ideal magnetic dipole is modeled as a real magnetic dipole whose area a has been reduced to zero and its current I increased to infinity such that the product m = Ia is finite. This model clarifies the connection between angular momentum and magnetic moment, which is the basis of the Einstein–de Haas effect rotation by magnetization and its inverse, the Barnett effect or magnetization by rotation. Rotating the loop faster (in the same direction) increases the current and therefore the magnetic moment, for example.
It is sometimes useful to model the magnetic dipole similar to the electric dipole with two equal but opposite magnetic charges (one south the other north) separated by distance d. This model produces an H-field not a B-field. Such a model is deficient, though, both in that there are no magnetic charges and in that it obscures the link between electricity and magnetism. Further, as discussed above it fails to explain the inherent connection between angular momentum and magnetism.
Magnetic monopole (hypothetical)
A magnetic monopole is a hypothetical particle (or class of particles) that has, as its name suggests, only one magnetic pole (either a north pole or a south pole). In other words, it would possess a "magnetic charge" analogous to an electric charge. Magnetic field lines would start or end on magnetic monopoles, so if they exist, they would give exceptions to the rule that magnetic field lines neither start nor end.
Modern interest in this concept stems from particle theories, notably Grand Unified Theories and superstring theories, that predict either the existence, or the possibility, of magnetic monopoles. These theories and others have inspired extensive efforts to search for monopoles. Despite these efforts, no magnetic monopole has been observed to date.
In recent research, materials known as spin ices can simulate monopoles, but do not contain actual monopoles.