
Website www.esa.int/rosetta Launch date 2 March 2004 | COSPAR ID 2004-006C Last contact 9 July 2015 | |
Mission duration Planned: 1-6 weeksHibernation: 15 November 2014 – 13 June 2015 Similar | ||
Philae (/ˈfaɪliː/ or /ˈfiːleɪ/) is a robotic European Space Agency lander that accompanied the Rosetta spacecraft until it separated to land on comet 67P/Churyumov–Gerasimenko, ten years and eight months after departing Earth. On 12 November 2014, Philae touched down on the comet, but it bounced when its anchoring harpoons failed to deploy and a thruster designed to hold the probe to the surface did not fire. After bouncing off the surface twice, Philae achieved the first-ever "soft" (nondestructive) landing on a comet nucleus, although the lander's final, uncontrolled touchdown left it in a non-optimal location and orientation.
Contents
- Mission
- Scientific goals
- Landing and surface operations
- Landing events
- Operations and communication loss
- Instrument results
- Reawakening and subsequent loss of communication
- Location
- Design
- Power management
- Instruments
- International contributions
- Media coverage
- Popular culture
- References

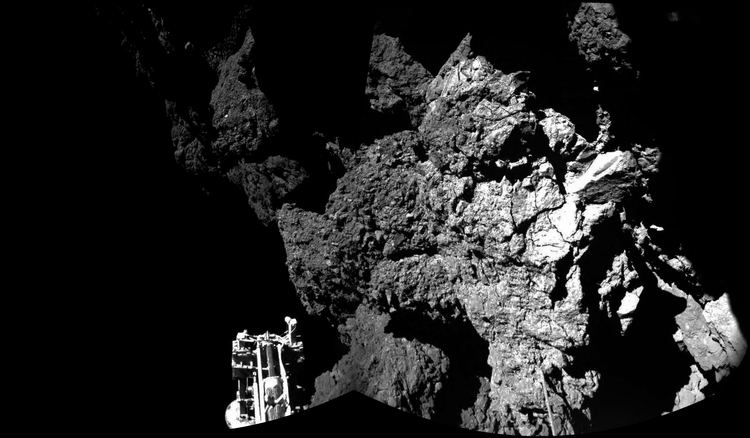
Despite the landing problems, the probe's instruments obtained the first images from a comet's surface. Several of the instruments on Philae made the first direct analysis of a comet, sending back data that will be analysed to determine the composition of the surface.
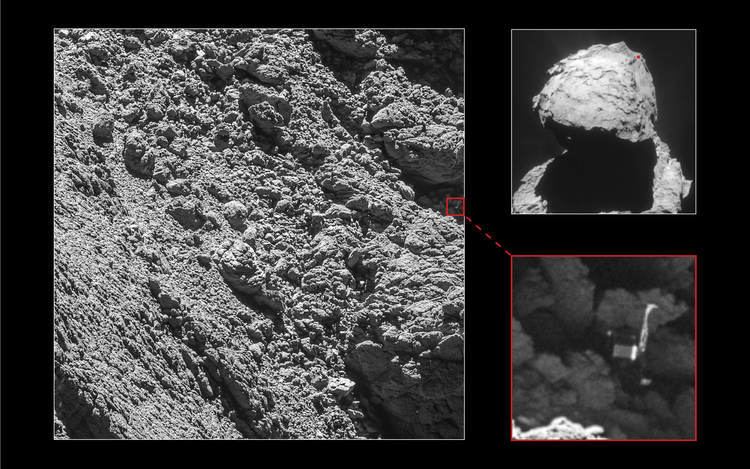
On 15 November 2014 Philae entered safe mode, or hibernation, after its batteries ran down due to reduced sunlight and an off-nominal spacecraft orientation at its unplanned landing site. Mission controllers hoped that additional sunlight on the solar panels might be sufficient to reboot the lander. Philae communicated sporadically with Rosetta from 13 June to 9 July 2015, but contact was then lost. The lander's location was identified to within a few tens of metres, but it was not seen. Philae, though silent, was finally identified unambiguously, lying on its side in a deep crack in the shadow of a cliff, in photographs taken by Rosetta on 2 September 2016 as the orbiter was sent on orbits closer to the comet. Knowledge of its precise location will help in interpretation of the images it had sent. On 30 September 2016, the Rosetta spacecraft ended its mission by landing in the comet's Ma'at region.

The lander is named after the Philae obelisk, which bears a bilingual inscription and was used along with the Rosetta Stone to decipher Egyptian hieroglyphs. Philae is monitored and operated from DLR's Lander Control Center in Cologne, Germany.
Mission
Philae's mission was to land successfully on the surface of a comet, attach itself, and transmit data about the comet's composition. The Rosetta spacecraft and Philae lander were launched on an Ariane 5G++ rocket from French Guiana on 2 March 2004, 07:17 UTC, and travelled for 3,907 days (10.7 years) to Churyumov–Gerasimenko. Unlike the Deep Impact probe, which by design struck comet Tempel 1's nucleus on 4 July 2005, Philae is not an impactor. Some of the instruments on the lander were used for the first time as autonomous systems during the Mars flyby on 25 February 2007. CIVA, one of the camera systems, returned some images while the Rosetta instruments were powered down, while ROMAP took measurements of the Martian magnetosphere. Most of the other instruments need contact with the surface for analysis and stayed offline during the flyby. An optimistic estimate of mission length following touchdown was "four to five months".
Scientific goals
The goals of the scientific mission have been summarized as follows:

"The scientific goals of its experiments focus on elemental, isotopic, molecular and mineralogical composition of the cometary material, the characterization of physical properties of the surface and subsurface material, the large-scale structure and the magnetic and plasma environment of the nucleus. In particular, surface and sub-surface samples will be acquired and sequentially analyzed by a suite of instruments. Measurements will be performed primarily during descent and along the first five days following touch-down."
Landing and surface operations
Philae remained attached to the Rosetta spacecraft after rendezvousing with Churyumov–Gerasimenko on 6 August 2014. On 15 September 2014, ESA announced "Site J" on the smaller lobe of the comet as the lander's destination. Following an ESA public contest in October 2014, Site J was renamed Agilkia in honour of Agilkia Island.
A series of four Go/NoGo checks were performed on 11–12 November 2014. One of the final tests before detachment from Rosetta showed that the lander's cold-gas thruster was not working correctly, but the "Go" was given anyway, as it could not be repaired. Philae detached from Rosetta on 12 November 2014 at 08:35 UTC SCET.
Landing events
Philae's landing signal was received by Earth communication stations at 16:03 UTC after a 28-minute delay. Unknown to mission scientists at that time, the lander had bounced. It began performing scientific measurements while slowly moving away from the comet and coming back down, confusing the science team. Further analysis showed that it bounced twice.
Philae's first contact with the comet occurred at 15:34:04 UTC SCET. The probe rebounded off the comet's surface at 38 cm/s (15 in/s) and rose to an altitude of approximately 1 km (0.62 mi). For perspective, had the lander exceeded about 44 cm/s (17 in/s), it would have escaped the comet's gravity. After detecting the touchdown, Philae's reaction wheel was automatically powered off, resulting in its momentum being transferred back into the lander. This caused the vehicle to begin rotating every 13 seconds. During this first bounce, at 16:20 UTC SCET, the lander is thought to have struck a surface prominence, which slowed its rotation to once every 24 seconds and sent the craft tumbling. Philae touched down a second time at 17:25:26 UTC SCET and rebounded at 3 cm/s (1.2 in/s). The lander came to a final stop on the surface at 17:31:17 UTC SCET. It sits in rough terrain apparently in the shadow of a nearby cliff or crater wall and is canted at an angle of around 30 degrees, but is otherwise undamaged. Its final location was determined initially by analysis of data from CONSERT in combination with the comet shape model based on images from the Rosetta orbiter, and later precisely by direct imaging from Rosetta.
An analysis of telemetry indicated that the initial impact was softer than expected, that the harpoons had not deployed, and that the thruster had not fired. The harpoon propulsion system contained 0.3 grams of nitrocellulose, which was shown by Copenhagen Suborbitals in 2013 to be unreliable in a vacuum.
Operations and communication loss
The primary battery was designed to power the instruments for about 60 hours. ESA expected that a secondary rechargeable battery would be partially filled by the solar panels attached to the outside of the lander, but the limited sunlight (90 minutes per 12.4-hour comet day) at the actual landing site is inadequate to maintain Philae's activities, at least in this phase of the comet's orbit.
On the morning of 14 November 2014, the battery charge was estimated to be only enough for continuing operations for the remainder of the day. After first obtaining data from instruments whose operation did not require mechanical movement, comprising about 80% of the planned initial science observations, both the MUPUS soil penetrator and the SD2 drill were commanded to deploy. Subsequently, MUPUS data as well as COSAC and Ptolemy data were returned. A final set of CONSERT data was also downlinked towards the end of operations. During the evening's transmission session, Philae was raised by 4 centimetres (1.6 in) and its body rotated 35 degrees to more favourably position the largest solar panel to capture the most sunlight in the future. Shortly afterwards, electrical power dwindled rapidly and all instruments were forced to shut down. The downlink rate slowed to a trickle before coming to a stop. Contact was lost on 15 November at 00:36 UTC.
The German Aerospace Center's lander manager Stephan Ulamec stated:
Prior to falling silent, the lander was able to transmit all science data gathered during the First Science Sequence. ... This machine performed magnificently under tough conditions, and we can be fully proud of the incredible scientific success Philae has delivered.
Instrument results
Data from the SESAME instrument determined that, rather than being "soft and fluffy" as expected, Philae's first touchdown site held a large amount of water ice under a layer of granular material about 25 cm (9.8 in) deep. It found that the mechanical strength of the ice was high and that cometary activity in that region was low. At the final landing site, the MUPUS instrument was unable to hammer very far into the comet's surface, despite power being gradually increased. This area was determined to have the consistency of solid ice or pumice.
In the atmosphere of the comet, the COSAC instrument detected the presence of molecules containing carbon and hydrogen. Soil elements could not be assessed because the lander was unable to drill into the comet surface, likely due to hard ice. The SD2 drill went through the necessary steps to deliver a surface sample to the COSAC instrument, but nothing entered the COSAC ovens.
Upon Philae's first touchdown on the comet's surface, COSAC measured material at the bottom of the vehicle which was disturbed by the landing, while the Ptolemy instrument measured material at the top of the vehicle. Sixteen organic compounds were detected, four of which were seen for the first time on a comet, including acetamide, acetone, methyl isocyanate and propionaldehyde.
Reawakening and subsequent loss of communication
On 13 June 2015 at 20:28 UTC, ground controllers received an 85-second transmission from Philae, forwarded by Rosetta, indicating that the lander was in good health and had sufficiently recharged its batteries to come out of safe mode. Philae sent historical data indicating that although it had been operating earlier than 13 June 2015, it had been unable to contact Rosetta before that date. The lander reported that it was operating with 24 watts of electrical power at −35 °C (−31 °F).
A new contact between Rosetta and Philae was confirmed on 19 June 2015. The first signal was received on the ground from Rosetta at 13:37 UTC, while a second signal was received at 13:54 UTC. These contacts lasted about two minutes each and delivered additional status data. By 26 June 2015, there had been a total of seven intermittent contacts between the lander and orbiter. There are two opportunities for contact between the two spacecraft each Earth day, but their duration and quality depends on the orientation of the transmitting antenna on Philae and the location of Rosetta along its trajectory around the comet. Similarly, as the comet rotates, Philae is not always in sunlight and thus not always generating enough power via its solar panels to receive and transmit signals. ESA controllers continued to try to establish a stable contact duration of at least 50 minutes.
Had Philae landed at the planned site of Agilkia in November 2014, its mission would probably have ended in March 2015 due to the higher temperatures of that location as solar heating increased. As of June 2015, Philae's key remaining experiment was to drill into the comet's surface to determine its chemical composition. Ground controllers sent commands to power up the CONSERT radar instrument on 5 July 2015, but received no immediate response from the lander. Confirmation was eventually received on 9 July, when the lander transmitted measurement data from the instrument.
Immediately after its reawakening, housekeeping data suggested that the lander's systems were healthy, and mission control uploaded commands for Rosetta to establish a new orbit and nadir so as to optimize communications, diagnostics, and enable new science investigations with Philae. However, controllers had difficulties establishing a stable communications connection with the lander. The situation was not helped by the need to keep Rosetta at a greater and safer distance from the comet as it became more active. The last communication was on 9 July 2015, and mission controllers were unable to instruct Philae to carry out new investigations. Subsequently, Philae failed to respond to further commands, and by January 2016, controllers acknowledged no further communications were likely.
On 27 July 2016, at 09:00 UTC, ESA switched off the Electrical Support System Processor Unit (ESS) onboard Rosetta, making further communications with Philae impossible.
Location
The lander was located on 2 September 2016 by the narrow-angle camera aboard Rosetta as it was slowly making its descent to the comet. The search for the lander had been on-going during the Rosetta mission, using telemetry data and comparison of pictures taken before and after the lander's touchdown, looking for signs of the lander's specific reflectivity.
The search area was narrowed down to the most promising candidate, which was confirmed by a picture taken at a distance of 2.7 km (1.7 mi), clearly showing the lander. The lander sits on its side wedged into a dark crevice of the comet, explaining the lack of electrical power and proper communication with the probe. Knowing its exact location provides information needed to put Philae's two days of science into proper context.
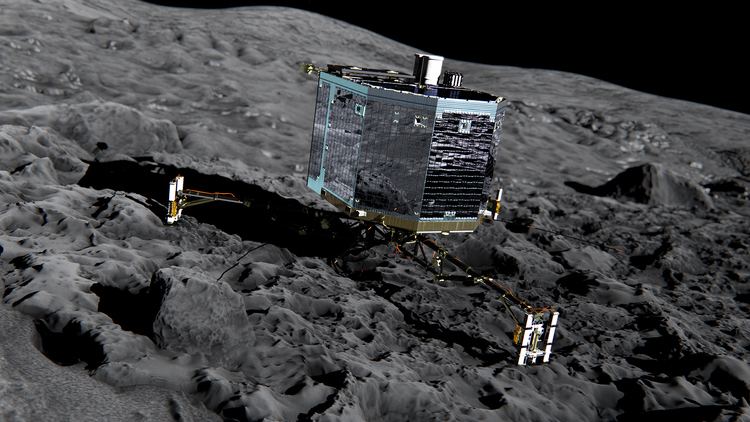
Design
The lander was designed to deploy from the main spacecraft body and descend from an orbit of 22.5 kilometres (14 mi) along a ballistic trajectory. It would touch down on the comet's surface at a velocity of around 1 metre per second (3.6 km/h; 2.2 mph). The legs were designed to dampen the initial impact to avoid bouncing as the comet's escape velocity is only around 1 m/s (3.6 km/h; 2.2 mph), and the impact energy was intended to drive ice screws into the surface. Philae was to then fire a harpoon into the surface at 70 m/s (250 km/h; 160 mph) to anchor itself. A thruster on top of Philae was to have fired to lessen the bounce upon impact and to reduce the recoil from harpoon firing. During the landing, the harpoons did not fire and the thruster failed to operate, leading to a multiple-contact landing.
Communications with Earth used the Rosetta orbiter as a relay station to reduce the electrical power needed. The mission duration on the surface was planned to be at least one week, but an extended mission lasting months was considered possible.
The main structure of the lander is made from carbon fibre, shaped into a plate maintaining mechanical stability, a platform for the science instruments, and a hexagonal "sandwich" to connect all the parts. The total mass is about 100 kilograms (220 lb). Its exterior is covered with solar cells for power generation.
The Rosetta mission was originally planned to rendezvous with the comet 46P/Wirtanen. A failure in a previous Ariane 5 launch vehicle closed the launch window to reach the comet with the same rocket. It resulted in a change in target to the comet 67P/Churyumov–Gerasimenko. The larger mass of Churyumov–Gerasimenko and the resulting increased impact velocity required that the landing gear of the lander be strengthened.
Power management
Philae's power management was planned for two phases. In the first phase, the lander operated solely on battery power. In the second phase, it was to run on backup batteries recharged by solar cells.
The power subsystem comprises two batteries: a non-rechargeable primary 1000 watt-hour battery to provide power for the first 60 hours and a secondary 140 watt-hour battery recharged by the solar panels to be used after the primary is exhausted. The solar panels cover 2.2 square metres (24 sq ft) and were designed to deliver up to 32 watts at a distance of 3 AU from the Sun.
Instruments
The science payload of the lander consists of ten instruments totalling 26.7 kilograms (59 lb), making up just over one quarter of the mass of the lander.
International contributions
Media coverage
The landing was featured heavily in social media, with the lander having an official Twitter account portraying a personification of the spacecraft. The hashtag "#CometLanding" gained widespread traction. A Livestream of the control centres was set up, as were multiple official and unofficial events around the world to follow Philae's landing on Churyumov–Gerasimenko. Various instruments on Philae were given their own Twitter accounts to announce news and science results.
Popular culture
Vangelis composed the music for the trio of music videos released by ESA to celebrate the first-ever attempted soft landing on a comet by ESA's Rosetta mission.
On 12 November 2014, the search engine Google featured a Google Doodle of Philae on its home page. On 31 December 2014, Google featured Philae again as part of its New Year's Eve 2014 Doodle.
Online comic author Randall Munroe wrote a live updating strip on his website xkcd on the day of the landing.