
 | ||
In mathematical analysis, a function of bounded variation, also known as a BV function, is a real-valued function whose total variation is bounded (finite): the graph of a function having this property is well behaved in a precise sense. For a continuous function of a single variable, being of bounded variation means that the distance along the direction of the y-axis, neglecting the contribution of motion along x-axis, traveled by a point moving along the graph has a finite value. For a continuous function of several variables, the meaning of the definition is the same, except for the fact that the continuous path to be considered cannot be the whole graph of the given function (which is a hypersurface in this case), but can be every intersection of the graph itself with a hyperplane (in the case of functions of two variables, a plane) parallel to a fixed x-axis and to the y-axis.
Contents
- History
- BV functions of one variable
- BV functions of several variables
- Locally BV functions
- Notation
- Basic properties
- BV functions have only jump type or removable discontinuities
- V is lower semi continuous on BV
- BV is a Banach space
- BV is not separable
- Chain rule for BV functions
- BV is a Banach algebra
- Weighted BV functions
- SBV functions
- bv sequences
- Measures of bounded variation
- Examples
- Mathematics
- Physics and engineering
- References
Functions of bounded variation are precisely those with respect to which one may find Riemann–Stieltjes integrals of all continuous functions.
Another characterization states that the functions of bounded variation on a compact interval are exactly those f which can be written as a difference g − h, where both g and h are bounded monotone.
In the case of several variables, a function f defined on an open subset Ω of ℝn is said to have bounded variation if its distributional derivative is a vector-valued finite Radon measure.
One of the most important aspects of functions of bounded variation is that they form an algebra of discontinuous functions whose first derivative exists almost everywhere: due to this fact, they can and frequently are used to define generalized solutions of nonlinear problems involving functionals, ordinary and partial differential equations in mathematics, physics and engineering.
We have the following chains of inclusions for functions over a compact subset of the real line:
Continuously differentiable ⊆ Lipschitz continuous ⊆ absolutely continuous ⊆ bounded variation ⊆ differentiable almost everywhereHistory
According to Boris Golubov, BV functions of a single variable were first introduced by Camille Jordan, in the paper (Jordan 1881) dealing with the convergence of Fourier series. The first successful step in the generalization of this concept to functions of several variables was due to Leonida Tonelli, who introduced a class of continuous BV functions in 1926 (Cesari 1986, pp. 47–48), to extend his direct method for finding solutions to problems in the calculus of variations in more than one variable. Ten years after, in (Cesari 1936), Lamberto Cesari changed the continuity requirement in Tonelli's definition to a less restrictive integrability requirement, obtaining for the first time the class of functions of bounded variation of several variables in its full generality: as Jordan did before him, he applied the concept to resolve of a problem concerning the convergence of Fourier series, but for functions of two variables. After him, several authors applied BV functions to study Fourier series in several variables, geometric measure theory, calculus of variations, and mathematical physics. Renato Caccioppoli and Ennio de Giorgi used them to define measure of nonsmooth boundaries of sets (see the entry "Caccioppoli set" for further information). Olga Arsenievna Oleinik introduced her view of generalized solutions for nonlinear partial differential equations as functions from the space BV in the paper (Oleinik 1957), and was able to construct a generalized solution of bounded variation of a first order partial differential equation in the paper (Oleinik 1959): few years later, Edward D. Conway and Joel A. Smoller applied BV-functions to the study of a single nonlinear hyperbolic partial differential equation of first order in the paper (Conway & Smoller 1966), proving that the solution of the Cauchy problem for such equations is a function of bounded variation, provided the initial value belongs to the same class. Aizik Isaakovich Vol'pert developed extensively a calculus for BV functions: in the paper (Vol'pert 1967) he proved the chain rule for BV functions and in the book (Hudjaev & Vol'pert 1985) he, jointly with his pupil Sergei Ivanovich Hudjaev, explored extensively the properties of BV functions and their application. His chain rule formula was later extended by Luigi Ambrosio and Gianni Dal Maso in the paper (Ambrosio & Dal Maso 1990).
BV functions of one variable
Definition 1.1. The total variation of a real-valued (or more generally complex-valued) function f, defined on an interval [a, b]⊂ℝ is the quantity
where the supremum is taken over the set
If f is differentiable and its derivative is Riemann-integrable, its total variation is the vertical component of the arc-length of its graph, that is to say,
Definition 1.2. A real-valued function
It can be proved that a real function ƒ is of bounded variation in
Through the Stieltjes integral, any function of bounded variation on a closed interval [a, b] defines a bounded linear functional on C([a, b]). In this special case, the Riesz representation theorem states that every bounded linear functional arises uniquely in this way. The normalised positive functionals or probability measures correspond to positive non-decreasing lower semicontinuous functions. This point of view has been important in spectral theory, in particular in its application to ordinary differential equations.
BV functions of several variables
Functions of bounded variation, BV functions, are functions whose distributional derivative is a finite Radon measure. More precisely:
Definition 2.1. Let
if there exists a finite vector Radon measure
that is,
An equivalent definition is the following.
Definition 2.2. Given a function
where
in order to emphasize that
The space of functions of bounded variation (BV functions) can then be defined as
The two definitions are equivalent since if
therefore
Locally BV functions
If the function space of locally integrable functions, i.e. functions belonging to
for every set
Notation
There are basically two distinct conventions for the notation of spaces of functions of locally or globally bounded variation, and unfortunately they are quite similar: the first one, which is the one adopted in this entry, is used for example in references Giusti (1984) (partially), Hudjaev & Vol'pert (1985) (partially), Giaquinta, Modica & Souček (1998) and is the following one
The second one, which is adopted in references Vol'pert (1967) and Maz'ya (1985) (partially), is the following:
Basic properties
Only the properties common to functions of one variable and to functions of several variables will be considered in the following, and proofs will be carried on only for functions of several variables since the proof for the case of one variable is a straightforward adaptation of the several variables case: also, in each section it will be stated if the property is shared also by functions of locally bounded variation or not. References (Giusti 1984, pp. 7–9), (Hudjaev & Vol'pert 1985) and (Màlek et al. 1996) are extensively used.
BV functions have only jump-type or removable discontinuities
In the case of one variable, the assertion is clear: for each point
while both limits exist and are finite. In the case of functions of several variables, there are some premises to understand: first of all, there is a continuum of directions along which it is possible to approach a given point
Then for each point
or
are called approximate limits of the BV function
V(·, Ω) is lower semi-continuous on BV(Ω)
The functional
Now considering the supremum on the set of functions
which is exactly the definition of lower semicontinuity.
BV(Ω) is a Banach space
By definition
for all
for all
where
BV(Ω) is not separable
To see this, it is sufficient to consider the following example belonging to the space
as the characteristic function of the left-closed interval
Now, in order to prove that every dense subset of
Obviously those balls are pairwise disjoint, and also are an indexed family of sets whose index set is
Chain rule for BV functions
Chain rules for nonsmooth functions are very important in mathematics and mathematical physics since there are several important physical models whose behavior is described by functions or functionals with a very limited degree of smoothness.The following version is proved in the paper (Vol'pert 1967, p. 248): all partial derivatives must be intended in a generalized sense. i.e. as generalized derivatives
Theorem. Let
where
A more general chain rule formula for Lipschitz continuous functions
This implies that the product of two functions of bounded variation is again a function of bounded variation, therefore
BV(Ω) is a Banach algebra
This property follows directly from the fact that
therefore the ordinary product of functions is continuous in
Weighted BV functions
It is possible to generalize the above notion of total variation so that different variations are weighted differently. More precisely, let
where, as usual, the supremum is taken over all finite partitions of the interval
The original notion of variation considered above is the special case of
The space
where
SBV functions
SBV functions i.e. Special functions of Bounded Variation were introduced by Luigi Ambrosio and Ennio de Giorgi in the paper (Ambrosio & De Giorgi 1988), dealing with free discontinuity variational problems: given an open subset
Definition. Given a locally integrable function
1. There exist two Borel functions
2. For all of continuously differentiable vector functions
where
Details on the properties of SBV functions can be found in works cited in the bibliography section: particularly the paper (De Giorgi 1992) contains a useful bibliography.
bv sequences
As particular examples of Banach spaces, Dunford & Schwartz (1958, Chapter IV) consider spaces of sequences of bounded variation, in addition to the spaces of functions of bounded variation. The total variation of a sequence x=(xi) of real or complex numbers is defined by
The space of all sequences of finite total variation is denoted by bv. The norm on bv is given by
With this norm, the space bv is a Banach space.
The total variation itself defines a norm on a certain subspace of bv, denoted by bv0, consisting of sequences x = (xi) for which
The norm on bv0 is denoted
With respect to this norm bv0 becomes a Banach space as well.
Measures of bounded variation
A signed (or complex) measure
Examples
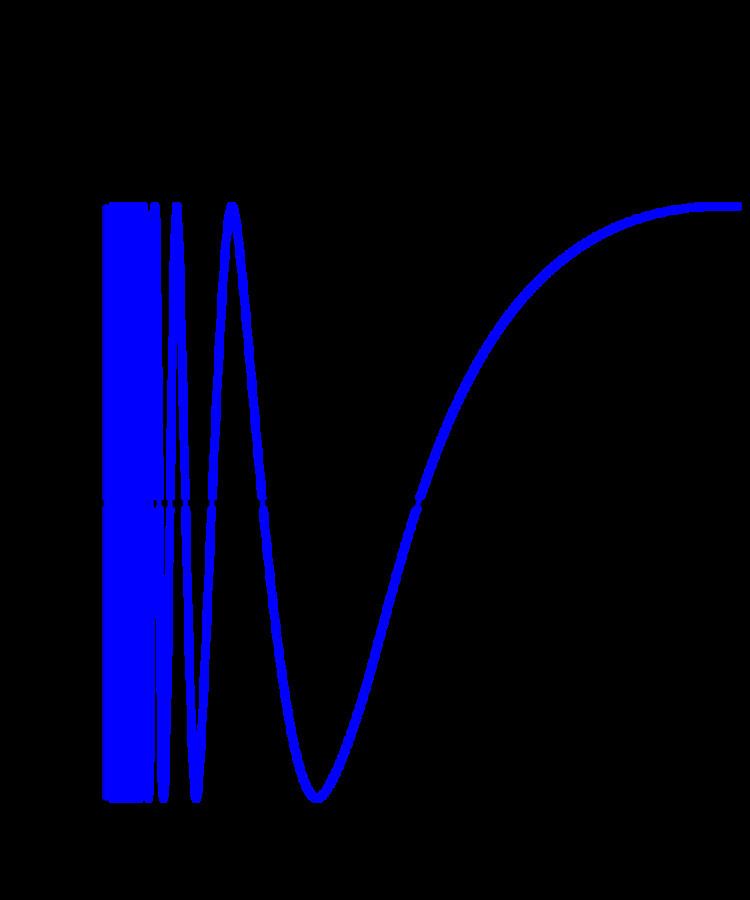
The function
is not of bounded variation on the interval
While it is harder to see, the continuous function
is not of bounded variation on the interval
At the same time, the function
is of bounded variation on the interval
The Sobolev space
holds, since it is nothing more than the definition of weak derivative, and hence holds true. One can easily find an example of a BV function which is not
Mathematics
Functions of bounded variation have been studied in connection with the set of discontinuities of functions and differentiability of real functions, and the following results are well-known. If
For real functions of several real variables
Physics and engineering
The ability of BV functions to deal with discontinuities has made their use widespread in the applied sciences: solutions of problems in mechanics, physics, chemical kinetics are very often representable by functions of bounded variation. The book (Hudjaev & Vol'pert 1985) details a very ample set of mathematical physics applications of BV functions. Also there is some modern application which deserves a brief description.