
 | ||
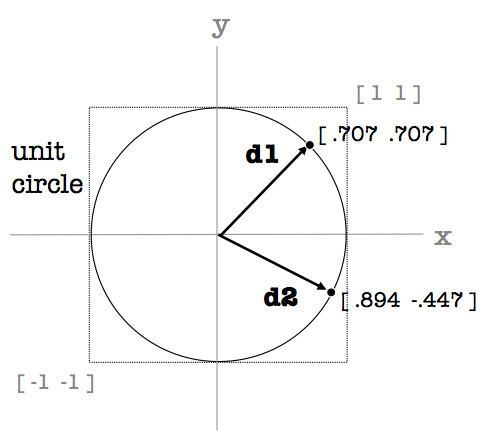
In mathematics, a unit vector in a normed vector space is a vector (often a spatial vector) of length 1. A unit vector is often denoted by a lowercase letter with a circumflex, or "hat":
Contents
- Cartesian coordinates
- Cylindrical coordinates
- Spherical coordinates
- General unit vectors
- Curvilinear coordinates
- References
The same construct is used to specify spatial directions in 3D. As illustrated, each unique direction is equivalent numerically to a point on the unit sphere.
The normalized vector or versor û of a non-zero vector u is the unit vector in the direction of u, i.e.,
where ||u|| is the norm (or length) of u. The term normalized vector is sometimes used as a synonym for unit vector.
Unit vectors are often chosen to form the basis of a vector space. Every vector in the space may be written as a linear combination of unit vectors.
By definition, in a Euclidean space the dot product of two unit vectors is a scalar value amounting to the cosine of the smaller subtended angle. In three-dimensional Euclidean space, the cross product of two arbitrary unit vectors is a 3rd vector orthogonal to both of them having length equal to the sine of the smaller subtended angle. The normalized cross product corrects for this varying length, and yields the mutually orthogonal unit vector to the two inputs, applying the right-hand rule to resolve one of two possible directions.
Cartesian coordinates
Unit vectors may be used to represent the axes of a Cartesian coordinate system. For instance, the unit vectors in the direction of the x, y, and z axes of a three dimensional Cartesian coordinate system are
They are sometimes referred to as the versors of the coordinate system, and they form a set of mutually orthogonal unit vectors, typically referred to as a standard basis in linear algebra.
They are often denoted using normal vector notation (e.g., i or
When a unit vector in space is expressed, with Cartesian notation, as a linear combination of i, j, k, its three scalar components can be referred to as direction cosines. The value of each component is equal to the cosine of the angle formed by the unit vector with the respective basis vector. This is one of the methods used to describe the orientation (angular position) of a straight line, segment of straight line, oriented axis, or segment of oriented axis (vector).
Cylindrical coordinates
The three orthogonal unit vectors appropriate to cylindrical symmetry are:
They are related to the Cartesian basis
It is important to note that
Spherical coordinates
The unit vectors appropriate to spherical symmetry are:
The spherical unit vectors depend on both
General unit vectors
Common general themes of unit vectors occur throughout physics and geometry:
Curvilinear coordinates
In general, a coordinate system may be uniquely specified using a number of linearly independent unit vectors
where δij is the Kronecker delta (which is one for i = j and zero else) and