
 | ||
In elementary algebra, the quadratic formula is the solution of the quadratic equation. There are other ways to solve the quadratic equation instead of using the quadratic formula, such as factoring, completing the square, or graphing. Using the quadratic formula is often the most convenient way.
Contents
- Derivation of the formula
- Geometrical significance
- Historical development
- Other derivations
- Alternate method of completing the square
- By substitution
- By using algebraic identities
- By Lagrange resolvents
- By extrema
- Dimensional analysis
- References
The general quadratic equation is
Here x represents an unknown, while a, b, and c are constants with a not equal to 0. One can verify that the quadratic formula satisfies the quadratic equation, by inserting the former into the latter. With the above parameterization, the quadratic formula is:
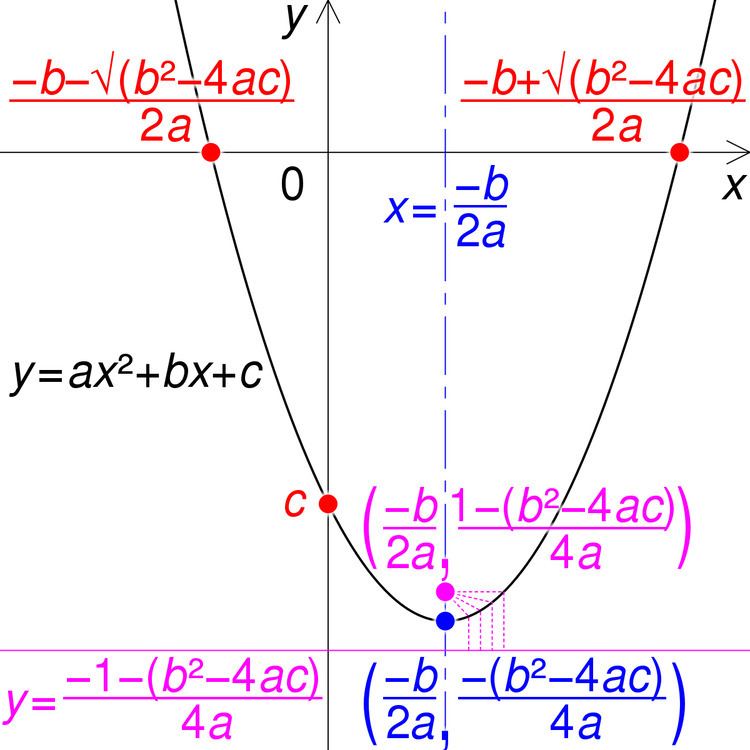
Each of the solutions given by the quadratic formula is called a root of the quadratic equation. Geometrically, these roots represent the x values at which any parabola, explicitly given as y = ax2 + bx + c, crosses the x-axis. As well as being a formula that will yield the zeros of any parabola, the quadratic equation will give the axis of symmetry of the parabola, and it can be used to immediately determine how many zeros it has.
Derivation of the formula
The quadratic formula can be derived with a simple application of technique of completing the square. For this reason, the derivation is sometimes left as an exercise for students, who can thus experience rediscovery of this important formula. The explicit derivation is as follows.
Divide the quadratic equation by a, which is allowed because a is non-zero:
Subtract c/a from both sides of the equation, yielding:
The quadratic equation is now in a form to which the method of completing the square can be applied. Thus, add a constant to both sides of the equation such that the left hand side becomes a complete square:
which produces:
Accordingly, after rearranging the terms on the right hand side to have a common denominator, we obtain:
The square has thus been completed. Taking the square root of both sides yields the following equation:
Isolating x gives the quadratic formula:
The plus-minus symbol "±" indicates that both
are solutions of the quadratic equation. There are many alternatives of this derivation with minor differences, mostly concerning the manipulation of a.
Some sources, particularly older ones, use alternative parameterizations of the quadratic equation such as ax2 − 2bx + c = 0 or ax2 + 2bx + c = 0, where b has a magnitude one half of the more common one. These result in slightly different forms for the solution, but are otherwise equivalent.
A lesser known quadratic formula, as used in Muller's method, and which can be found from Vieta's formulas, provides the same roots via the equation:
Geometrical significance
Without going into parabolas as geometrical objects on a cone (see Conic section), a parabola is any curve described by a second-degree polynomial, i.e. any equation of the form:
where p represents the polynomial of degree 2 and a0, a1, and a2 are constant coefficients whose subscripts correspond to their respective term's degree. The first and foremost geometrical application of the quadratic formula is that it will define the points along the x-axis where the parabola will cross it. Additionally, if the quadratic formula were broken into two terms,
the definition of the axis of symmetry appears as the −b/2a term. The other term, √b2 − 4ac/2a, must then be the distance the zeros are away from the axis of symmetry, where the plus sign represents the distance away to the right, and the minus sign represents the distance away to the left.
If this distance term were to decrease to zero, the axis of symmetry would be the x value of the zero, indicating there is only one possible solution to the quadratic equation. Algebraically, this means that √b2 − 4ac = 0, or simply b2 − 4ac = 0 (where the left-hand side is referred to as the discriminant), for its term to be reduced to zero. This is simply one of three cases, where the discriminant can indicate how many zeros the parabola will have. If the discriminant were positive, the distance would be non-zero, and there will be two solutions, as expected. However, there is the case where the discriminant is less than zero, and this indicates the distance will be imaginary — or some multiple of the unit i, such that i = √−1 — and the parabola's zeros will be a complex number. The complex roots will be complex conjugates, and by definition cannot be entirely real, where the real part of the complex root will be the axis of symmetry, therefore geometrical interpretation is that there are no real values of x such that the parabola will be observed to cross the x-axis.
Historical development
The earliest methods for solving quadratic equations were geometric. Babylonian cuneiform tablets contain problems reducible to solving quadratic equations. The Egyptian Berlin Papyrus, dating back to the Middle Kingdom (2050 BC to 1650 BC), contains the solution to a two-term quadratic equation.
The Greek mathematician Euclid (circa 300 BC) used geometric methods to solve quadratic equations in Book 2 of his Elements, an influential mathematical treatise. Rules for quadratic equations appear in the Chinese The Nine Chapters on the Mathematical Art circa 200 BC. In his work Arithmetica, the Greek mathematician Diophantus (circa 250 BC) solved quadratic equations with a method more recognizably algebraic than the geometric algebra of Euclid. His solution gives only one root, even when both roots are positive.
The Indian mathematician Brahmagupta (597–668 AD) explicitly described the quadratic formula in his treatise Brāhmasphuṭasiddhānta published in 628 AD, but written in words instead of symbols. His solution of the quadratic equation ax2 + bx = c was as follows: "To the absolute number multiplied by four times the [coefficient of the] square, add the square of the [coefficient of the] middle term; the square root of the same, less the [coefficient of the] middle term, being divided by twice the [coefficient of the] square is the value." This is equivalent to:
The 9th-century Persian mathematician al-Khwārizmī, influenced by earlier Greek and Indian mathematicians, solved quadratic equations algebraically. The quadratic formula covering all cases was first obtained by Simon Stevin in 1594. In 1637 René Descartes published La Géométrie containing the quadratic formula in the form we know today.
Other derivations
Many alternative derivations of the quadratic formula are in the literature. These derivations may be simpler than the standard completing the square method, may represent interesting applications of other algebraic techniques, or may offer insight into other areas of mathematics.
Alternate method of completing the square
The great majority of algebra texts published over the last several decades teach completing the square using the sequence presented earlier: (1) divide each side by a to make the equation monic, (2) rearrange, (3) then add (b/2a)2 to both sides to complete the square.
As pointed out by Larry Hoehn in 1975, completing the square can be accomplished by a different sequence that leads to a simpler sequence of intermediate terms: (1) multiply each side by 4a, (2) rearrange, (3) then add b2.
In other words, the quadratic formula can be derived as follows:
This actually represents an ancient derivation of the quadratic formula and was known to the Hindus at least as far back as 1025. Compared with the derivation in standard usage, this alternate derivation is shorter, involves fewer computations with literal coefficients, avoids fractions until the last step, has simpler expressions, and uses simpler mathematics. As Hoehn states, "it is easier 'to add the square of b' than it is 'to add the square of half the coefficient of the x term'".
By substitution
Another technique is solution by substitution. In this technique, we substitute x = y + m into the quadratic to get:
Expanding the result and then collecting the powers of y produces:
We have not yet imposed a second condition on y and m, so we now choose m so that the middle term vanishes. That is, 2am + b = 0 or m = −b/2a. Subtracting the constant term from both sides of the equation (to move it to the right hand side) and then dividing by a gives:
Substituting for m gives:
Therefore,
substituting x = y + m = y −b/2a provides the quadratic formula.
By using algebraic identities
The following method was used by many historical mathematicians:
Let the roots of the standard quadratic equation be r1 and r2. The derivation starts by recalling the identity:
Taking the square root on both sides, we get:
Since the coefficient a ≠ 0, we can divide the standard equation by a to obtain a quadratic polynomial having the same roots. Namely,
From this we can see that the sum of the roots of the standard quadratic equation is given by −b/a, and the product of those roots is given by c/a. Hence the identity can be rewritten as:
Now,
Since r2 = −r1 − b/a, if we take
then we obtain
and if we instead take
then we calculate that
Combining these results by using the standard shorthand ±, we have that the solutions of the quadratic equation are given by:
By Lagrange resolvents
An alternative way of deriving the quadratic formula is via the method of Lagrange resolvents, which is an early part of Galois theory. This method can be generalized to give the roots of cubic polynomials and quartic polynomials, and leads to Galois theory, which allows one to understand the solution of algebraic equations of any degree in terms of the symmetry group of their roots, the Galois group.
This approach focuses on the roots more than on rearranging the original equation. Given a monic quadratic polynomial
assume that it factors as
Expanding yields
where p = −(α + β) and q = αβ.
Since the order of multiplication does not matter, one can switch α and β and the values of p and q will not change: one can say that p and q are symmetric polynomials in α and β. In fact, they are the elementary symmetric polynomials – any symmetric polynomial in α and β can be expressed in terms of α + β and αβ The Galois theory approach to analyzing and solving polynomials is: given the coefficients of a polynomial, which are symmetric functions in the roots, can one "break the symmetry" and recover the roots? Thus solving a polynomial of degree n is related to the ways of rearranging ("permuting") n terms, which is called the symmetric group on n letters, and denoted Sn. For the quadratic polynomial, the only way to rearrange two terms is to swap them ("transpose" them), and thus solving a quadratic polynomial is simple.
To find the roots α and β, consider their sum and difference:
These are called the Lagrange resolvents of the polynomial; notice that one of these depends on the order of the roots, which is the key point. One can recover the roots from the resolvents by inverting the above equations:
Thus, solving for the resolvents gives the original roots.
Now r1 = α + β is a symmetric function in α and β, so it can be expressed in terms of p and q, and in fact r1 = −p as noted above. But r2 = α − β is not symmetric, since switching α and β yields −r2 = β − α (formally, this is termed a group action of the symmetric group of the roots). Since r2 is not symmetric, it cannot be expressed in terms of the coefficients p and q, as these are symmetric in the roots and thus so is any polynomial expression involving them. Changing the order of the roots only changes r2 by a factor of −1, and thus the square r22 = (α − β)2 is symmetric in the roots, and thus expressible in terms of p and q. Using the equation
yields
and thus
If one takes the positive root, breaking symmetry, one obtains:
and thus
Thus the roots are
which is the quadratic formula. Substituting p = b/a, q = c/a yields the usual form for when a quadratic is not monic. The resolvents can be recognized as r1/2 = −p/2 = −b/2a being the vertex, and r22 = p2 − 4q is the discriminant (of a monic polynomial).
A similar but more complicated method works for cubic equations, where one has three resolvents and a quadratic equation (the "resolving polynomial") relating r2 and r3, which one can solve by the quadratic equation, and similarly for a quartic equation (degree 4), whose resolving polynomial is a cubic, which can in turn be solved. The same method for a quintic equation yields a polynomial of degree 24, which does not simplify the problem, and in fact solutions to quintic equations in general cannot be expressed using only roots.
By extrema
Knowing the value of x in the functional extreme point makes it possible to solve only for the increase (or decrease) needed in x to solve the quadratic equation. This method first uses differentiation to find the x value at the extremum, called xext. We then solve for the value, q, that ensures that f(xext + q) = 0. While this may not be the most intuitive method, it ensures that the mathematics is straightforward.
Setting the above differential to zero will give us the extrema of the quadratic function
We define q as follows:
Here x0 is the value of x that solves the quadratic equation. The sum of xext and the variable of interest, q, is plugged in to the quadratic equation
The value of x in the extreme point is then added to both sides of the equation
This gives the quadratic formula. This way one avoids the technique of completing the square and much more complicated math is not needed. Note this solution is very similar to solving deriving the formula by substitution.
Dimensional analysis
If the constants a, b, and/or c are not unitless, then the units of x must be equal to the units of b/a, due to the requirement that ax2 and bx agree on their units. Furthermore, by the same logic, the units of c must be equal to the units of b2/a, which can be verified without solving for x. This can be a powerful tool for verifying that a quadratic expression of physical quantities has been set up correctly, prior to solving it.