
 | ||
In classical physics and special relativity, an inertial frame of reference (also inertial reference frame or inertial frame, Galilean reference frame or inertial space) is a frame of reference that describes time and space homogeneously, isotropically, and in a time-independent manner. The physics of a system in an inertial frame have no causes external to the system.
Contents
- Introduction
- Background
- A set of frames where the laws of physics are simple
- Absolute space
- Newtonian mechanics
- Special relativity
- General relativity
- References
All inertial frames are in a state of constant, rectilinear motion with respect to one another; an accelerometer moving with any of them would detect zero acceleration. Measurements in one inertial frame can be converted to measurements in another by a simple transformation (the Galilean transformation in Newtonian physics and the Lorentz transformation in special relativity). In general relativity, in any region small enough for the curvature of spacetime and tidal forces to be negligible, one can find a set of inertial frames that approximately describe that region. Systems in non-inertial frames in general relativity don't have external causes because of the principle of geodesic motion.
Physical laws take the same form in all inertial frames. By contrast, in a non-inertial reference frame in classical physics and special relativity, the physics of a system vary depending on the acceleration of that frame with respect to an inertial frame, and the usual physical forces must be supplemented by fictitious forces. For example, a ball dropped towards the ground does not go exactly straight down because the Earth is rotating. Someone rotating with the Earth must account for the Coriolis effect—in this case thought of as a force—to predict the horizontal motion. Another example of such a fictitious force associated with rotating reference frames is the centrifugal effect, or centrifugal force.
Introduction
The motion of a body can only be described relative to something else—other bodies, observers, or a set of space-time coordinates. These are called frames of reference. If the coordinates are chosen badly, the laws of motion may be more complex than necessary. For example, suppose a free body that has no external forces on it is at rest at some instant. In many coordinate systems, it would begin to move at the next instant, even though there are no forces on it. However, a frame of reference can always be chosen in which it remains stationary. Similarly, if space is not described uniformly or time independently, a coordinate system could describe the simple flight of a free body in space as a complicated zig-zag in its coordinate system. Indeed, an intuitive summary of inertial frames can be given as: In an inertial reference frame, the laws of mechanics take their simplest form.
In an inertial frame, Newton's first law, the law of inertia, is satisfied: Any free motion has a constant magnitude and direction. Newton's second law for a particle takes the form:
with F the net force (a vector), m the mass of a particle and a the acceleration of the particle (also a vector) which would be measured by an observer at rest in the frame. The force F is the vector sum of all "real" forces on the particle, such as electromagnetic, gravitational, nuclear and so forth. In contrast, Newton's second law in a rotating frame of reference, rotating at angular rate Ω about an axis, takes the form:
which looks the same as in an inertial frame, but now the force F′ is the resultant of not only F, but also additional terms (the paragraph following this equation presents the main points without detailed mathematics):
where the angular rotation of the frame is expressed by the vector Ω pointing in the direction of the axis of rotation, and with magnitude equal to the angular rate of rotation Ω, symbol × denotes the vector cross product, vector xB locates the body and vector vB is the velocity of the body according to a rotating observer (different from the velocity seen by the inertial observer).
The extra terms in the force F′ are the "fictitious" forces for this frame, whose causes are external to the system in the frame. The first extra term is the Coriolis force, the second the centrifugal force, and the third the Euler force. These terms all have these properties: they vanish when Ω = 0; that is, they are zero for an inertial frame (which, of course, does not rotate); they take on a different magnitude and direction in every rotating frame, depending upon its particular value of Ω; they are ubiquitous in the rotating frame (affect every particle, regardless of circumstance); and they have no apparent source in identifiable physical sources, in particular, matter. Also, fictitious forces do not drop off with distance (unlike, for example, nuclear forces or electrical forces). For example, the centrifugal force that appears to emanate from the axis of rotation in a rotating frame increases with distance from the axis.
All observers agree on the real forces, F; only non-inertial observers need fictitious forces. The laws of physics in the inertial frame are simpler because unnecessary forces are not present.
In Newton's time the fixed stars were invoked as a reference frame, supposedly at rest relative to absolute space. In reference frames that were either at rest with respect to the fixed stars or in uniform translation relative to these stars, Newton's laws of motion were supposed to hold. In contrast, in frames accelerating with respect to the fixed stars, an important case being frames rotating relative to the fixed stars, the laws of motion did not hold in their simplest form, but had to be supplemented by the addition of fictitious forces, for example, the Coriolis force and the centrifugal force. Two interesting experiments were devised by Newton to demonstrate how these forces could be discovered, thereby revealing to an observer that they were not in an inertial frame: the example of the tension in the cord linking two spheres rotating about their center of gravity, and the example of the curvature of the surface of water in a rotating bucket. In both cases, application of Newton's second law would not work for the rotating observer without invoking centrifugal and Coriolis forces to account for their observations (tension in the case of the spheres; parabolic water surface in the case of the rotating bucket).
As we now know, the fixed stars are not fixed. Those that reside in the Milky Way turn with the galaxy, exhibiting proper motions. Those that are outside our galaxy (such as nebulae once mistaken to be stars) participate in their own motion as well, partly due to expansion of the universe, and partly due to peculiar velocities. The Andromeda galaxy is on collision course with the Milky Way at a speed of 117 km/s. The concept of inertial frames of reference is no longer tied to either the fixed stars or to absolute space. Rather, the identification of an inertial frame is based upon the simplicity of the laws of physics in the frame. In particular, the absence of fictitious forces is their identifying property.
In practice, although not a requirement, using a frame of reference based upon the fixed stars as though it were an inertial frame of reference introduces very little discrepancy. For example, the centrifugal acceleration of the Earth because of its rotation about the Sun is about thirty million times greater than that of the Sun about the galactic center.
To illustrate further, consider the question: "Does our Universe rotate?" To answer, we might attempt to explain the shape of the Milky Way galaxy using the laws of physics, although other observations might be more definitive, that is, provide larger discrepancies or less measurement uncertainty, like the anisotropy of the microwave background radiation or Big Bang nucleosynthesis. The flatness of the Milky Way depends on its rate of rotation in an inertial frame of reference. If we attribute its apparent rate of rotation entirely to rotation in an inertial frame, a different "flatness" is predicted than if we suppose part of this rotation actually is due to rotation of the universe and should not be included in the rotation of the galaxy itself. Based upon the laws of physics, a model is set up in which one parameter is the rate of rotation of the Universe. If the laws of physics agree more accurately with observations in a model with rotation than without it, we are inclined to select the best-fit value for rotation, subject to all other pertinent experimental observations. If no value of the rotation parameter is successful and theory is not within observational error, a modification of physical law is considered, for example, dark matter is invoked to explain the galactic rotation curve. So far, observations show any rotation of the universe is very slow, no faster than once every 60·1012 years (10−13 rad/yr), and debate persists over whether there is any rotation. However, if rotation were found, interpretation of observations in a frame tied to the universe would have to be corrected for the fictitious forces inherent in such rotation in classical physics and special relativity, or interpreted as the curvature of spacetime and the motion of matter along the geodesics in general relativity.
When quantum effects are important, there are additional conceptual complications that arise in quantum reference frames.
Background
A brief comparison of inertial frames in special relativity and in Newtonian mechanics, and the role of absolute space is next.
A set of frames where the laws of physics are simple
According to the first postulate of special relativity, all physical laws take their simplest form in an inertial frame, and there exist multiple inertial frames interrelated by uniform translation:
Special principle of relativity: If a system of coordinates K is chosen so that, in relation to it, physical laws hold good in their simplest form, the same laws hold good in relation to any other system of coordinates K' moving in uniform translation relatively to K.
This simplicity manifests in that inertial frames have self-contained physics without the need for external causes, while physics in non-inertial frames have external causes. The principle of simplicity can be used within Newtonian physics as well as in special relativity; see Nagel and also Blagojević.
The laws of Newtonian mechanics do not always hold in their simplest form...If, for instance, an observer is placed on a disc rotating relative to the earth, he/she will sense a 'force' pushing him/her toward the periphery of the disc, which is not caused by any interaction with other bodies. Here, the acceleration is not the consequence of the usual force, but of the so-called inertial force. Newton's laws hold in their simplest form only in a family of reference frames, called inertial frames. This fact represents the essence of the Galilean principle of relativity:
The laws of mechanics have the same form in all inertial frames.
In practical terms, the equivalence of inertial reference frames means that scientists within a box moving uniformly cannot determine their absolute velocity by any experiment (otherwise the differences would set up an absolute standard reference frame). According to this definition, supplemented with the constancy of the speed of light, inertial frames of reference transform among themselves according to the Poincaré group of symmetry transformations, of which the Lorentz transformations are a subgroup. In Newtonian mechanics, which can be viewed as a limiting case of special relativity in which the speed of light is infinite, inertial frames of reference are related by the Galilean group of symmetries.
Absolute space
Newton posited an absolute space considered well approximated by a frame of reference stationary relative to the fixed stars. An inertial frame was then one in uniform translation relative to absolute space. However, some scientists (called "relativists" by Mach), even at the time of Newton, felt that absolute space was a defect of the formulation, and should be replaced.
Indeed, the expression inertial frame of reference (German: Inertialsystem) was coined by Ludwig Lange in 1885, to replace Newton's definitions of "absolute space and time" by a more operational definition. As translated by Iro, Lange proposed the following definition:
A reference frame in which a mass point thrown from the same point in three different (non co-planar) directions follows rectilinear paths each time it is thrown, is called an inertial frame.
A discussion of Lange's proposal can be found in Mach.
The inadequacy of the notion of "absolute space" in Newtonian mechanics is spelled out by Blagojević:
The utility of operational definitions was carried much further in the special theory of relativity. Some historical background including Lange's definition is provided by DiSalle, who says in summary:
The original question, "relative to what frame of reference do the laws of motion hold?" is revealed to be wrongly posed. For the laws of motion essentially determine a class of reference frames, and (in principle) a procedure for constructing them.
Newtonian mechanics
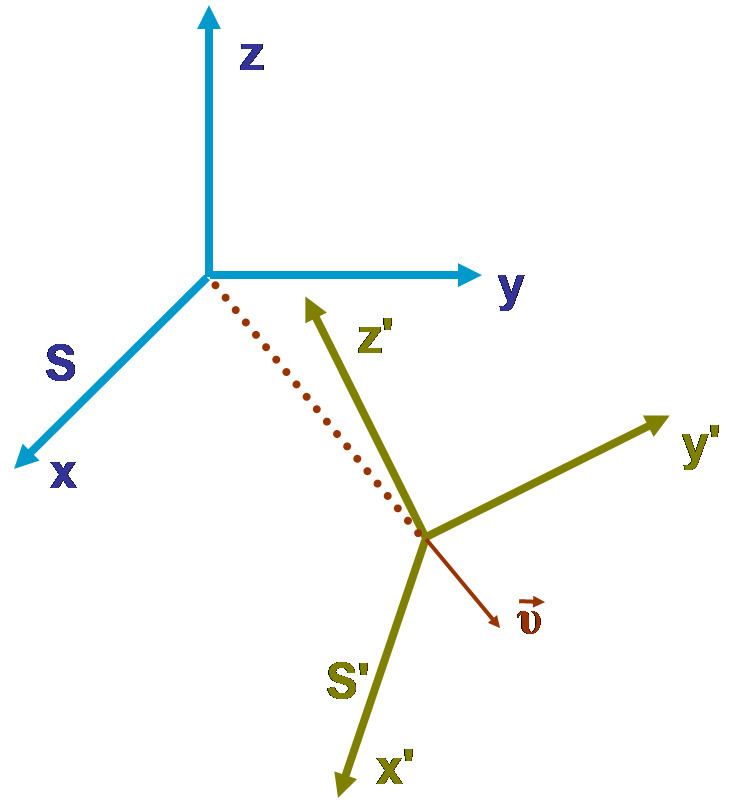
Classical mechanics, which includes relativity, assumes the equivalence of all inertial reference frames. Newtonian mechanics makes the additional assumptions of absolute space and absolute time. Given these two assumptions, the coordinates of the same event (a point in space and time) described in two inertial reference frames are related by a Galilean transformation.
where r0 and t0 represent shifts in the origin of space and time, and v is the relative velocity of the two inertial reference frames. Under Galilean transformations, the time t2 − t1 between two events is the same for all inertial reference frames and the distance between two simultaneous events (or, equivalently, the length of any object, |r2 − r1|) is also the same.
Special relativity
Einstein's theory of special relativity, like Newtonian mechanics, assumes the equivalence of all inertial reference frames, but makes an additional assumption, foreign to Newtonian mechanics, namely, that in free space light always is propagated with the speed of light c0, a defined value independent of its direction of propagation and its frequency, and also independent of the state of motion of the emitting body. This second assumption has been verified experimentally and leads to counter-intuitive deductions including:
These deductions are logical consequences of the stated assumptions, and are general properties of space-time, typically without regard to a consideration of properties pertaining to the structure of individual objects like atoms or stars, nor to the mechanisms of clocks.
These effects are expressed mathematically by the Lorentz transformation
where shifts in origin have been ignored, the relative velocity is assumed to be in the
The Lorentz transformation is equivalent to the Galilean transformation in the limit c0 → ∞ (a hypothetical case) or v → 0 (low speeds).
Under Lorentz transformations, the time and distance between events may differ among inertial reference frames; however, the Lorentz scalar distance s between two events is the same in all inertial reference frames
From this perspective, the speed of light is only accidentally a property of light, and is rather a property of spacetime, a conversion factor between conventional time units (such as seconds) and length units (such as meters).
Incidentally, because of the limitations on speeds faster than the speed of light, notice that in a rotating frame of reference (which is a non-inertial frame, of course) stationarity is not possible at arbitrary distances because at large radius the object would move faster than the speed of light.
General relativity
General relativity is based upon the principle of equivalence:
There is no experiment observers can perform to distinguish whether an acceleration arises because of a gravitational force or because their reference frame is accelerating.
This idea was introduced in Einstein's 1907 article "Principle of Relativity and Gravitation" and later developed in 1911. Support for this principle is found in the Eötvös experiment, which determines whether the ratio of inertial to gravitational mass is the same for all bodies, regardless of size or composition. To date no difference has been found to a few parts in 1011. For some discussion of the subtleties of the Eötvös experiment, such as the local mass distribution around the experimental site (including a quip about the mass of Eötvös himself), see Franklin.
Einstein’s general theory modifies the distinction between nominally "inertial" and "noninertial" effects by replacing special relativity's "flat" Minkowski Space with a metric that produces non-zero curvature. In general relativity, the principle of inertia is replaced with the principle of geodesic motion, whereby objects move in a way dictated by the curvature of spacetime. As a consequence of this curvature, it is not a given in general relativity that inertial objects moving at a particular rate with respect to each other will continue to do so. This phenomenon of geodesic deviation means that inertial frames of reference do not exist globally as they do in Newtonian mechanics and special relativity.
However, the general theory reduces to the special theory over sufficiently small regions of spacetime, where curvature effects become less important and the earlier inertial frame arguments can come back into play. Consequently, modern special relativity is now sometimes described as only a "local theory".