
 | ||
In physics, net force is the overall force acting on an object. In order to calculate the net force, the body is isolated and interactions with the environment or other constraints are represented as forces and torques in a free-body diagram.
Contents
- Total force
- Parallelogram rule for the addition of forces
- Point forces
- Rigid bodies
- Resultant force
- Usage
- References
The net force does not have the same effect on the movement of the object as the original system forces, unless the point of application of the net force and an associated torque are determined so that they form the resultant force and torque. It is always possible to determine the torque associated with a point of application of a net force so that it maintains the movement of the object under the original system of forces.
With its associated torque, the net force becomes the resultant force and has the same effect on the rotational motion of the object as all actual forces taken together. It is possible for a system of forces to define a torque-free resultant force. In this case, the net force when applied at the proper line of action has the same effect on the body as all of the forces at their points of application. It is not always possible to find a torque-free resultant force.
Total force
The sum of forces acting on a particle is called the total force or the net force. The net force is a single force that replaces the effect of the original forces on the particle's motion. It gives the particle the same acceleration as all those actual forces together as described by the Newton's second law of motion.
Force is a vector quantity, which means that it has a magnitude and a direction, and it is usually denoted using boldface such as F or by using an arrow over the symbol, such as
Graphically, a force is represented as line segment from its point of application A to a point B which defines its direction and magnitude. The length of the segment AB represents the magnitude of the force.
Vector calculus was developed in the late 1800s and early 1900s. The parallelogram rule used for the addition of forces, however, dates from antiquity and is noted explicitly by Galileo and Newton.
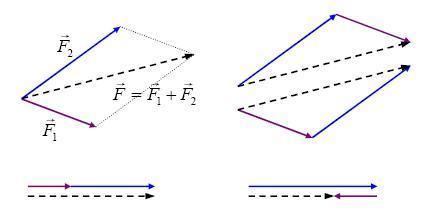
The diagram shows the addition of the forces
Forces applied to an extended body can have different points of application. Forces are bound vectors and can be added only if they are applied at the same point. The net force obtained from all the forces acting on a body will not preserve its motion unless they are applied at the same point and the appropriate torque associated with the new point of application is determined. The net force on a body applied at a single point with the appropriate torque is known as the resultant force and torque.
Parallelogram rule for the addition of forces
A force is known as a bound vector which means it has a direction and magnitude and a point of application. A convenient way to define a force is by a line segment from a point A to a point B. If we denote the coordinates of these points as A=(Ax, Ay, Az) and B=(Bx, By, Bz), then the force vector applied at A is given by
The length of the vector B-A defines the magnitude of F and is given by
The sum of two forces F1 and F2 applied at A can be computed from the sum of the segments that define them. Let F1=B-A and F2=D-A, then the sum of these two vectors is
which can be written as
where E is the midpoint of the segment BD that joins the points B and D.
Thus, the sum of the forces F1 and F2 is twice the segment joining A to the midpoint E of the segment joining the endpoints B and D of the two forces. The doubling of this length is easily achieved by defining a segments BC and DC parallel to AD and AB, respectively, to complete the parallelogram ABCD. The diagonal AC of this parallelogram is the sum of the two force vectors. This is known as the parallelogram rule for the addition of forces.
Point forces
When a force acts on a particle, it is applied to a single point (the particle volume is negligible): this is a point force and the particle is its application point. But an external force on an extended body (object) can be applied to a number of its constituent particles, i.e. can be "spread" over some volume or surface of the body. However, in order to determine its rotational effect on the body, it is necessary to specify its point of application (actually, the line of application, as explained below). The problem is usually resolved in the following ways:
In any case, the analysis of the rigid body motion begins with the point force model. And when a force acting on a body is shown graphically, the oriented line segment representing the force is usually drawn so as to "begin" (or "end") at the application point.
Rigid bodies
In the example shown in the diagram opposite, a single force
In the second expression,
The vector
The torque vector is perpendicular to the plane defined by the force and the vector
The moment of inertia
Resultant force
Resultant force and torque replaces the effects of a system of forces acting on the movement of a rigid body. An interesting special case is a torque-free resultant which can be found as follows:
- Vector addition is used to find the net force;
- Use the equation to determine the point of application with zero torque:
where
The diagram opposite illustrates simple graphical methods for finding the line of application of the resultant force of simple planar systems:
- Lines of application of the actual forces
F → 1 F → 2 F → 1 F → R - The illustration in the middle of the diagram shows two parallel actual forces. After vector addition "at the location of
F → 2 F → R - The rightmost illustration shows a couple, two equal but opposite forces for which the amount of the net force is zero, but they produce the net torque
τ = F d whered is the distance between their lines of application. Since there is no resultant force, this torque can be [is?] described as "pure" torque.
Usage
In general, a system of forces acting on a rigid body can always be replaced by one force plus one pure (see previous section) torque. The force is the net force, but in order to calculate the additional torque, the net force must be assigned the line of action. The line of action can be selected arbitrarily, but the additional pure torque will depend on this choice. In a special case it is possible to find such line of action that this additional torque is zero.
The resultant force and torque can be determined for any configuration of forces. However, an interesting special case is a torque-free resultant which it is useful both conceptually and practically, because the body moves without rotating as if it was a particle.
Some authors do not distinguish the resultant force from the net force and use the terms as synonyms.