
 | ||
The fundamental theorem of calculus is a theorem that links the concept of the derivative of a function with the concept of the function's integral.
Contents
- History
- Geometric meaning
- Physical intuition
- Formal statements
- First part
- Corollary
- Second part
- Proof of the first part
- Proof of the corollary
- Proof of the second part
- Examples
- Generalizations
- References
The first part of the theorem, sometimes called the first fundamental theorem of calculus, is that the indefinite integral of a function is related to its antiderivative, and can be reversed by differentiation. This part of the theorem guarantees the existence of antiderivatives for continuous functions.
The second part of the theorem, sometimes called the second fundamental theorem of calculus, is that the definite integral of a function can be computed by using any one of its infinitely many antiderivatives. This part of the theorem has key practical applications because it markedly simplifies the computation of definite integrals.
History
The fundamental theorem of calculus relates differentiation and integration, showing that these two operations are essentially inverses of one another. Before the discovery of this theorem, it was not recognized that these two operations were related. Ancient Greek mathematicians knew how to compute area via infinitesimals, an operation that we would now call integration. The origins of differentiation likewise predate the Fundamental Theorem of Calculus by hundreds of years; for example, in the fourteenth century the notions of continuity of functions and motion were studied by the Oxford Calculators and other scholars. The historical relevance of the Fundamental Theorem of Calculus is not the ability to calculate these operations, but the realization that the two seemingly distinct operations (calculation of geometric areas, and calculation of velocities) are actually closely related.
The first published statement and proof of a rudimentary form of the fundamental theorem, strongly geometric in character, was by James Gregory (1638–1675). Isaac Barrow (1630–1677) proved a more generalized version of the theorem, while his student Isaac Newton (1642–1727) completed the development of the surrounding mathematical theory. Gottfried Leibniz (1646–1716) systematized the knowledge into a calculus for infinitesimal quantities and introduced the notation used today.
Geometric meaning
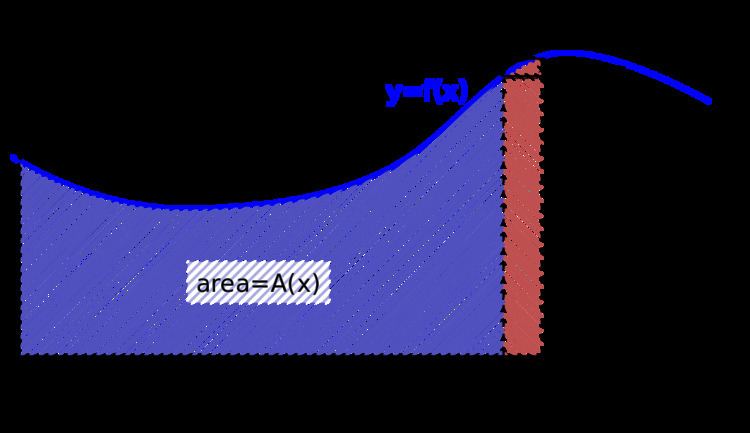
For a continuous function y = f(x) whose graph is plotted as a curve, each value of x has a corresponding area function A(x), representing the area beneath the curve between 0 and x. The function A(x) may not be known, but it is given that it represents the area under the curve.
The area under the curve between x and x + h could be computed by finding the area between 0 and x + h, then subtracting the area between 0 and x. In other words, the area of this “sliver” would be A(x + h) − A(x).
There is another way to estimate the area of this same sliver. As shown in the accompanying figure, h is multiplied by f(x) to find the area of a rectangle that is approximately the same size as this sliver. So:
In fact, this estimate becomes a perfect equality if we add the red portion of the "excess" area shown in the diagram. So:
Rearranging terms:
As h approaches 0 in the limit, the last fraction can be shown to go to zero. This is true because the area of the red portion of excess region is less than or equal to the area of the tiny black-bordered rectangle. More precisely,
By the continuity of f, the latter expression tends to zero as h does. Therefore, the left-hand side tends to zero as h does, which implies
This implies f(x) = A′(x). That is, the derivative of the area function A(x) exists and is the original function f(x); so, the area function is simply an antiderivative of the original function. Computing the derivative of a function and “finding the area” under its curve are "opposite" operations. This is the crux of the Fundamental Theorem of Calculus.
Physical intuition
Intuitively, the theorem simply states that the sum of infinitesimal changes in a quantity over time (or over some other variable) adds up to the net change in the quantity.
Imagine for example using a stopwatch to mark-off tiny increments of time as a car travels down a highway. Imagine also looking at the car's speedometer as it travels, so that at every moment you know the velocity of the car. To understand the power of this theorem, imagine also that you are not allowed to look out the window of the car, so that you have no direct evidence of how far the car has traveled.
For any tiny interval of time in the car, you could calculate how far the car has traveled in that interval by multiplying the current speed of the car times the length of that tiny interval of time. (This is because distance = speed
Now imagine doing this instant after instant, so that for every tiny interval of time you know how far the car has traveled. In principle, you could then calculate the total distance traveled in the car (even though you've never looked out the window) by simply summing-up all those tiny distances.
distance traveled =In other words,
distance traveled =On the right hand side of this equation, as
Now remember that the velocity function is simply the derivative of the position function. So what we have really shown is that integrating the velocity simply recovers the original position function. This is the basic idea of the theorem: that integration and differentiation are closely related operations, each essentially being the inverse of the other.
In other words, in terms of one's physical intuition, the theorem simply states that the sum of the changes in a quantity over time (such as position, as calculated by multiplying velocity times time) adds up to the total net change in the quantity. Or to put this more generally:
then the idea that "distance equals speed times time" corresponds to the statement
meaning that one can recover the original function
Formal statements
There are two parts to the theorem. Loosely put, the first part deals with the derivative of an antiderivative, while the second part deals with the relationship between antiderivatives and definite integrals.
First part
This part is sometimes referred to as the first fundamental theorem of calculus.
Let
Then,
for all
Alternatively, if
Corollary
The fundamental theorem is often employed to compute the definite integral of a function
The corollary assumes continuity on the whole interval. This result is strengthened slightly in the following part of the theorem.
Second part
This part is sometimes referred to as the second fundamental theorem of calculus or the Newton–Leibniz axiom.
Let
If
The second part is somewhat stronger than the corollary because it does not assume that
When an antiderivative
Proof of the first part
For a given f(t), define the function F(x) as
For any two numbers x1 and x1 + Δx in [a, b], we have
and
Subtracting the two equalities gives
It can be shown that
Manipulating this equation gives
Substituting the above into (1) results in
According to the mean value theorem for integration, there exists a real number
To keep the notation simple we will continue writing c instead of
Dividing both sides by Δx gives
Take the limit as Δx → 0 on both sides of the equation.
The expression on the left side of the equation is the definition of the derivative of F at x1.
To find the other limit, we use the squeeze theorem. The number c is in the interval [x1, x1 + Δx], so x1 ≤ c ≤ x1 + Δx.
Also,
Therefore, according to the squeeze theorem,
Substituting into (3), we get
The function f is continuous at c, so the limit can be taken inside the function. Therefore, we get
which completes the proof.
(Leithold et al., 1996) (a rigorous proof can be found http://www.imomath.com/index.php?options=438)
Proof of the corollary
Suppose F is an antiderivative of f, with f continuous on [a, b]. Let
By the first part of the theorem, we know G is also an antiderivative of f. Since F' - G' = 0 the mean value theorem implies that F - G is a constant function, i. e. there is a number c such that G(x) = F(x) + c, for all x in [a, b]. Letting x = a, we have
which means c = − F(a). In other words, G(x) = F(x) − F(a), and so
Proof of the second part
This is a limit proof by Riemann sums. Let f be (Riemann) integrable on the interval [a, b], and let f admit an antiderivative F on [a, b]. Begin with the quantity F(b) − F(a). Let there be numbers x1, ..., xn such that
It follows that
Now, we add each F(xi) along with its additive inverse, so that the resulting quantity is equal:
The above quantity can be written as the following sum:
Next, we employ the mean value theorem. Stated briefly,
Let F be continuous on the closed interval [a, b] and differentiable on the open interval (a, b). Then there exists some c in (a, b) such that
It follows that
The function F is differentiable on the interval [a, b]; therefore, it is also differentiable and continuous on each interval [xi−1, xi]. According to the mean value theorem (above),
Substituting the above into (1), we get
The assumption implies
We are describing the area of a rectangle, with the width times the height, and we are adding the areas together. Each rectangle, by virtue of the mean value theorem, describes an approximation of the curve section it is drawn over. Also
By taking the limit of the expression as the norm of the partitions approaches zero, we arrive at the Riemann integral. We know that this limit exists because f was assumed to be integrable. That is, we take the limit as the largest of the partitions approaches zero in size, so that all other partitions are smaller and the number of partitions approaches infinity.
So, we take the limit on both sides of (2). This gives us
Neither F(b) nor F(a) is dependent on
The expression on the right side of the equation defines the integral over f from a to b. Therefore, we obtain
which completes the proof.
It almost looks like the first part of the theorem follows directly from the second. That is, suppose G is an antiderivative of f. Then by the second theorem,
and there is no simpler expression for this function. It is therefore important not to interpret the second part of the theorem as the definition of the integral. Indeed, there are many functions that are integrable but lack elementary antiderivatives, and discontinuous functions can be integrable but lack any antiderivatives at all. Conversely, many functions that have antiderivatives are not Riemann integrable (see Volterra's function).
Examples
As an example, suppose the following is to be calculated:
Here,
Or, more generally, suppose that
is to be calculated. Here,
Or, equivalently,
Generalizations
We don't need to assume continuity of f on the whole interval. Part I of the theorem then says: if f is any Lebesgue integrable function on [a, b] and x0 is a number in [a, b] such that f is continuous at x0, then
is differentiable for x = x0 with F′(x0) = f(x0). We can relax the conditions on f still further and suppose that it is merely locally integrable. In that case, we can conclude that the function F is differentiable almost everywhere and F′(x) = f(x) almost everywhere. On the real line this statement is equivalent to Lebesgue's differentiation theorem. These results remain true for the Henstock–Kurzweil integral, which allows a larger class of integrable functions (Bartle 2001, Thm. 4.11).
In higher dimensions Lebesgue's differentiation theorem generalizes the Fundamental theorem of calculus by stating that for almost every x, the average value of a function f over a ball of radius r centered at x tends to f(x) as r tends to 0.
Part II of the theorem is true for any Lebesgue integrable function f, which has an antiderivative F (not all integrable functions do, though). In other words, if a real function F on [a, b] admits a derivative f(x) at every point x of [a, b] and if this derivative f is Lebesgue integrable on [a, b], then
This result may fail for continuous functions F that admit a derivative f(x) at almost every point x, as the example of the Cantor function shows. However, if F is absolutely continuous, it admits a derivative F′(x) at almost every point x, and moreover F′ is integrable, with F(b) − F(a) equal to the integral of F′ on [a, b]. Conversely, if f is any integrable function, then F as given in the first formula will be absolutely continuous with F′ = f a.e.
The conditions of this theorem may again be relaxed by considering the integrals involved as Henstock–Kurzweil integrals. Specifically, if a continuous function F(x) admits a derivative f(x) at all but countably many points, then f(x) is Henstock–Kurzweil integrable and F(b) − F(a) is equal to the integral of f on [a, b]. The difference here is that the integrability of f does not need to be assumed. (Bartle 2001, Thm. 4.7)
The version of Taylor's theorem, which expresses the error term as an integral, can be seen as a generalization of the fundamental theorem.
There is a version of the theorem for complex functions: suppose U is an open set in C and f : U → C is a function that has a holomorphic antiderivative F on U. Then for every curve γ : [a, b] → U, the curve integral can be computed as
The fundamental theorem can be generalized to curve and surface integrals in higher dimensions and on manifolds. One such generalization offered by the calculus of moving surfaces is the time evolution of integrals. The most familiar extensions of the fundamental theorem of calculus in higher dimensions are the divergence theorem and the gradient theorem.
One of the most powerful statements in this direction is Stokes' theorem: Let M be an oriented piecewise smooth manifold of dimension n and let
Here d is the exterior derivative, which is defined using the manifold structure only.
The theorem is often used in situations where M is an embedded oriented submanifold of some bigger manifold on which the form