
 | ||
In continuum mechanics, the Cauchy stress tensor
Contents
- EulerCauchy stress principle stress vector
- Cauchys postulate
- Cauchys fundamental lemma
- Cauchys stress theoremstress tensor
- Transformation rule of the stress tensor
- Normal and shear stresses
- Cauchys first law of motion
- Cauchys second law of motion
- Principal stresses and stress invariants
- Maximum and minimum shear stresses
- Stress deviator tensor
- Invariants of the stress deviator tensor
- Octahedral stresses
- References
where,
The Cauchy stress tensor obeys the tensor transformation law under a change in the system of coordinates. A graphical representation of this transformation law is the Mohr's circle for stress.
The Cauchy stress tensor is used for stress analysis of material bodies experiencing small deformations: It is a central concept in the linear theory of elasticity. For large deformations, also called finite deformations, other measures of stress are required, such as the Piola–Kirchhoff stress tensor, the Biot stress tensor, and the Kirchhoff stress tensor.
According to the principle of conservation of linear momentum, if the continuum body is in static equilibrium it can be demonstrated that the components of the Cauchy stress tensor in every material point in the body satisfy the equilibrium equations (Cauchy's equations of motion for zero acceleration). At the same time, according to the principle of conservation of angular momentum, equilibrium requires that the summation of moments with respect to an arbitrary point is zero, which leads to the conclusion that the stress tensor is symmetric, thus having only six independent stress components, instead of the original nine.
There are certain invariants associated with the stress tensor, whose values do not depend upon the coordinate system chosen, or the area element upon which the stress tensor operates. These are the three eigenvalues of the stress tensor, which are called the principal stresses.
Euler–Cauchy stress principle – stress vector
The Euler–Cauchy stress principle states that upon any surface (real or imaginary) that divides the body, the action of one part of the body on the other is equivalent (equipollent) to the system of distributed forces and couples on the surface dividing the body, and it is represented by a field
To formulate the Euler–Cauchy stress principle, consider an imaginary surface
Following the classical dynamics of Newton and Euler, the motion of a material body is produced by the action of externally applied forces which are assumed to be of two kinds: surface forces
Only surface forces will be discussed in this article as they are relevant to the Cauchy stress tensor.
When the body is subjected to external surface forces or contact forces
where
Cauchy’s stress principle asserts that as
The resultant vector
This equation means that the stress vector depends on its location in the body and the orientation of the plane on which it is acting.
This implies that the balancing action of internal contact forces generates a contact force density or Cauchy traction field
Depending on the orientation of the plane under consideration, the stress vector may not necessarily be perpendicular to that plane, i.e. parallel to
Cauchy’s postulate
According to the Cauchy Postulate, the stress vector
Cauchy’s fundamental lemma
A consequence of Cauchy’s postulate is Cauchy’s Fundamental Lemma, also called the Cauchy reciprocal theorem, which states that the stress vectors acting on opposite sides of the same surface are equal in magnitude and opposite in direction. Cauchy’s fundamental lemma is equivalent to Newton's third law of motion of action and reaction, and is expressed as
Cauchy’s stress theorem—stress tensor
The state of stress at a point in the body is then defined by all the stress vectors T(n) associated with all planes (infinite in number) that pass through that point. However, according to Cauchy’s fundamental theorem, also called Cauchy’s stress theorem, merely by knowing the stress vectors on three mutually perpendicular planes, the stress vector on any other plane passing through that point can be found through coordinate transformation equations.
Cauchy’s stress theorem states that there exists a second-order tensor field σ(x, t), called the Cauchy stress tensor, independent of n, such that T is a linear function of n:
This equation implies that the stress vector T(n) at any point P in a continuum associated with a plane with normal unit vector n can be expressed as a function of the stress vectors on the planes perpendicular to the coordinate axes, i.e. in terms of the components σij of the stress tensor σ.
To prove this expression, consider a tetrahedron with three faces oriented in the coordinate planes, and with an infinitesimal area dA oriented in an arbitrary direction specified by a normal unit vector n (Figure 2.2). The tetrahedron is formed by slicing the infinitesimal element along an arbitrary plane n. The stress vector on this plane is denoted by T(n). The stress vectors acting on the faces of the tetrahedron are denoted as T(e1), T(e2), and T(e3), and are by definition the components σij of the stress tensor σ. This tetrahedron is sometimes called the Cauchy tetrahedron. The equilibrium of forces, i.e. Euler’s first law of motion (Newton’s second law of motion), gives:
where the right-hand-side represents the product of the mass enclosed by the tetrahedron and its acceleration: ρ is the density, a is the acceleration, and h is the height of the tetrahedron, considering the plane n as the base. The area of the faces of the tetrahedron perpendicular to the axes can be found by projecting dA into each face (using the dot product):
and then substituting into the equation to cancel out dA:
To consider the limiting case as the tetrahedron shrinks to a point, h must go to 0 (intuitively, the plane n is translated along n toward O). As a result, the right-hand-side of the equation approaches 0, so
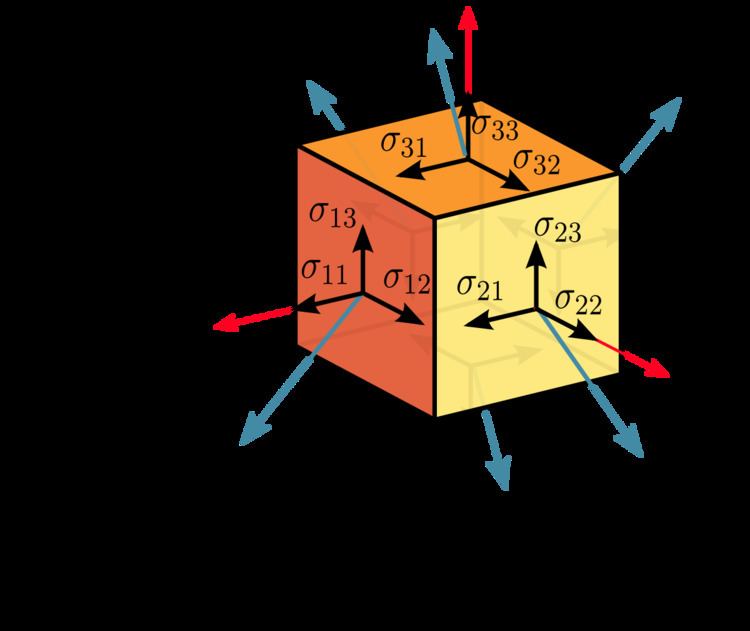
Assuming a material element (Figure 2.3) with planes perpendicular to the coordinate axes of a Cartesian coordinate system, the stress vectors associated with each of the element planes, i.e. T(e1), T(e2), and T(e3) can be decomposed into a normal component and two shear components, i.e. components in the direction of the three coordinate axes. For the particular case of a surface with normal unit vector oriented in the direction of the x1-axis, denote the normal stress by σ11, and the two shear stresses as σ12 and σ13:
In index notation this is
The nine components σij of the stress vectors are the components of a second-order Cartesian tensor called the Cauchy stress tensor, which completely defines the state of stress at a point and is given by
where σ11, σ22, and σ33 are normal stresses, and σ12, σ13, σ21, σ23, σ31, and σ32 are shear stresses. The first index i indicates that the stress acts on a plane normal to the xi-axis, and the second index j denotes the direction in which the stress acts. A stress component is positive if it acts in the positive direction of the coordinate axes, and if the plane where it acts has an outward normal vector pointing in the positive coordinate direction.
Thus, using the components of the stress tensor
or, equivalently,
Alternatively, in matrix form we have
The Voigt notation representation of the Cauchy stress tensor takes advantage of the symmetry of the stress tensor to express the stress as a six-dimensional vector of the form:
The Voigt notation is used extensively in representing stress–strain relations in solid mechanics and for computational efficiency in numerical structural mechanics software.
Transformation rule of the stress tensor
It can be shown that the stress tensor is a contravariant second order tensor, which is a statement of how it transforms under a change of the coordinate system. From an xi-system to an xi' -system, the components σij in the initial system are transformed into the components σij' in the new system according to the tensor transformation rule (Figure 2.4):
where A is a rotation matrix with components aij. In matrix form this is
Expanding the matrix operation, and simplifying terms using the symmetry of the stress tensor, gives
The Mohr circle for stress is a graphical representation of this transformation of stresses.
Normal and shear stresses
The magnitude of the normal stress component σn of any stress vector T(n) acting on an arbitrary plane with normal unit vector n at a given point, in terms of the components σij of the stress tensor σ, is the dot product of the stress vector and the normal unit vector:
The magnitude of the shear stress component τn, acting orthogonal to the vector n, can then be found using the Pythagorean theorem:
where
Cauchy's first law of motion
According to the principle of conservation of linear momentum, if the continuum body is in static equilibrium it can be demonstrated that the components of the Cauchy stress tensor in every material point in the body satisfy the equilibrium equations.
For example, for a hydrostatic fluid in equilibrium conditions, the stress tensor takes on the form:
where
Cauchy's second law of motion
According to the principle of conservation of angular momentum, equilibrium requires that the summation of moments with respect to an arbitrary point is zero, which leads to the conclusion that the stress tensor is symmetric, thus having only six independent stress components, instead of the original nine:
However, in the presence of couple-stresses, i.e. moments per unit volume, the stress tensor is non-symmetric. This also is the case when the Knudsen number is close to one,
Principal stresses and stress invariants
At every point in a stressed body there are at least three planes, called principal planes, with normal vectors
The components
A stress vector parallel to the normal unit vector
where
Knowing that
This is a homogeneous system, i.e. equal to zero, of three linear equations where
Expanding the determinant leads to the characteristic equation
where
The characteristic equation has three real roots
For each eigenvalue, there is a non-trivial solution for
A coordinate system with axes oriented to the principal directions implies that the normal stresses are the principal stresses and the stress tensor is represented by a diagonal matrix:
The principal stresses can be combined to form the stress invariants,
Because of its simplicity, the principal coordinate system is often useful when considering the state of the elastic medium at a particular point. Principal stresses are often expressed in the following equation for evaluating stresses in the x and y directions or axial and bending stresses on a part. The principal normal stresses can then be used to calculate the von Mises stress and ultimately the safety factor and margin of safety.
Using just the part of the equation under the square root is equal to the maximum and minimum shear stress for plus and minus. This is shown as:
Maximum and minimum shear stresses
The maximum shear stress or maximum principal shear stress is equal to one-half the difference between the largest and smallest principal stresses, and acts on the plane that bisects the angle between the directions of the largest and smallest principal stresses, i.e. the plane of the maximum shear stress is oriented
Assuming
When the stress tensor is non zero the normal stress component acting on the plane for the maximum shear stress is non-zero and it is equal to
Stress deviator tensor
The stress tensor
- a mean hydrostatic stress tensor or volumetric stress tensor or mean normal stress tensor,
π δ i j - a deviatoric component called the stress deviator tensor,
s i j
So:
where
Pressure (
where
The deviatoric stress tensor can be obtained by subtracting the hydrostatic stress tensor from the Cauchy stress tensor:
Invariants of the stress deviator tensor
As it is a second order tensor, the stress deviator tensor also has a set of invariants, which can be obtained using the same procedure used to calculate the invariants of the stress tensor. It can be shown that the principal directions of the stress deviator tensor
where
Because
A quantity called the equivalent stress or von Mises stress is commonly used in solid mechanics. The equivalent stress is defined as
Octahedral stresses
Considering the principal directions as the coordinate axes, a plane whose normal vector makes equal angles with each of the principal axes (i.e. having direction cosines equal to
Knowing that the stress tensor of point O (Figure 6) in the principal axes is
the stress vector on an octahedral plane is then given by:
The normal component of the stress vector at point O associated with the octahedral plane is
which is the mean normal stress or hydrostatic stress. This value is the same in all eight octahedral planes. The shear stress on the octahedral plane is then