
 | ||
Finite strain theory
In continuum mechanics, the finite strain theory—also called large strain theory, or large deformation theory—deals with deformations in which both rotations and strains are arbitrarily large, i.e. invalidates the assumptions inherent in infinitesimal strain theory. In this case, the undeformed and deformed configurations of the continuum are significantly different and a clear distinction has to be made between them. This is commonly the case with elastomers, plastically-deforming materials and other fluids and biological soft tissue.
Contents
- Finite strain theory
- Displacement
- Material coordinates Lagrangian description
- Spatial coordinates Eulerian description
- Relationship between the material and spatial coordinate systems
- Combining the coordinate systems of deformed and undeformed configurations
- Deformation gradient tensor
- Relative displacement vector
- Taylor approximation
- Time derivative of the deformation gradient
- Transformation of a surface and volume element
- Polar decomposition of the deformation gradient tensor
- Deformation tensors
- The right CauchyGreen deformation tensor
- The Finger deformation tensor
- The left CauchyGreen or Finger deformation tensor
- The Cauchy deformation tensor
- Spectral representation
- Derivatives of stretch
- Physical interpretation of deformation tensors
- Finite strain tensors
- SethHill family of generalized strain tensors
- Stretch ratio
- Physical interpretation of the finite strain tensor
- Deformation tensors in curvilinear coordinates
- The deformation gradient in curvilinear coordinates
- The right CauchyGreen tensor in curvilinear coordinates
- Some relations between deformation measures and Christoffel symbols
- Compatibility conditions
- Compatibility of the deformation gradient
- Compatibility of the right CauchyGreen deformation tensor
- Compatibility of the left CauchyGreen deformation tensor
- References
Displacement
The displacement of a body has two components: a rigid-body displacement and a deformation.
A change in the configuration of a continuum body can be described by a displacement field. A displacement field is a vector field of all displacement vectors for all particles in the body, which relates the deformed configuration with the undeformed configuration. Relative displacement between particles occurs if and only if deformation has occurred. If displacement occurs without deformation, then it is deemed a rigid-body displacement.
Material coordinates (Lagrangian description)
The displacement of particles indexed by variable i may be expressed as follows. The vector joining the positions of a particle in the undeformed configuration
Where
Expressed in terms of the material coordinates, the displacement field is:
Where
The partial derivative of the displacement vector with respect to the material coordinates yields the material displacement gradient tensor
where
Spatial coordinates (Eulerian description)
In the Eulerian description, the vector joining the positions of a particle
Where
Expressed in terms of spatial coordinates, the displacement field is:
The partial derivative of the displacement vector with respect to the spatial coordinates yields the spatial displacement gradient tensor
Relationship between the material and spatial coordinate systems
The relationship between
Knowing that
then
Combining the coordinate systems of deformed and undeformed configurations
It is common to superimpose the coordinate systems for the deformed and undeformed configurations, which results in
Thus in material (deformed) coordinates, the displacement may be expressed as:
And in spatial (undeformed) coordinates, the displacement may be expressed as:
Deformation gradient tensor
The deformation gradient tensor
Due to the assumption of continuity of
The material deformation gradient tensor
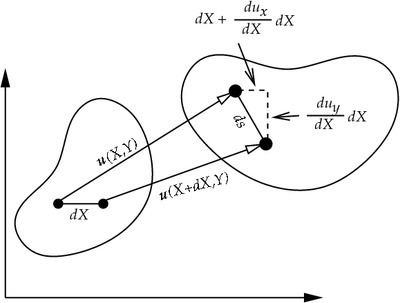
Relative displacement vector
Consider a particle or material point
Consider now a material point
where
Taylor approximation
For an infinitesimal element
Thus, the previous equation
Time-derivative of the deformation gradient
Calculations that involve the time-dependent deformation of a body often require a time derivative of the deformation gradient to be calculated. A geometrically consistent definition of such a derivative requires an excursion into differential geometry but we avoid those issues in this article.
The time derivative of
where
where
assuming
Related quantities often used in continuum mechanics are the rate of deformation tensor and the spin tensor defined, respectively, as:
The rate of deformation tensor gives the rate of stretching of line elements while the spin tensor indicates the rate of rotation or vorticity of the motion.
Transformation of a surface and volume element
To transform quantities that are defined with respect to areas in a deformed configuration to those relative to areas in a reference configuration, and vice versa, we use Nanson's relation, expressed as
where
The corresponding formula for the transformation of the volume element is
Polar decomposition of the deformation gradient tensor
The deformation gradient
where the tensor
This decomposition implies that the deformation of a line element
Due to the orthogonality of
so that
This polar decomposition is unique as
Deformation tensors
Several rotation-independent deformation tensors are used in mechanics. In solid mechanics, the most popular of these are the right and left Cauchy–Green deformation tensors.
Since a pure rotation should not induce any stresses in a deformable body, it is often convenient to use rotation-independent measures of deformation in continuum mechanics. As a rotation followed by its inverse rotation leads to no change (
The right Cauchy–Green deformation tensor
In 1839, George Green introduced a deformation tensor known as the right Cauchy–Green deformation tensor or Green's deformation tensor, defined as:
Physically, the Cauchy–Green tensor gives us the square of local change in distances due to deformation, i.e.
Invariants of
where
The Finger deformation tensor
The IUPAC recommends that the inverse of the right Cauchy–Green deformation tensor (called the Cauchy tensor in that document), i. e.,
The left Cauchy–Green or Finger deformation tensor
Reversing the order of multiplication in the formula for the right Green–Cauchy deformation tensor leads to the left Cauchy–Green deformation tensor which is defined as:
The left Cauchy–Green deformation tensor is often called the Finger deformation tensor, named after Josef Finger (1894).
Invariants of
where
For incompressible materials, a slightly different set of invariants is used:
The Cauchy deformation tensor
Earlier in 1828, Augustin Louis Cauchy introduced a deformation tensor defined as the inverse of the left Cauchy–Green deformation tensor,
Spectral representation
If there are three distinct principal stretches
Furthermore,
Observe that
Therefore the uniqueness of the spectral decomposition also implies that
The effect of
In a similar vein,
Derivatives of stretch
Derivatives of the stretch with respect to the right Cauchy–Green deformation tensor are used to derive the stress-strain relations of many solids, particularly hyperelastic materials. These derivatives are
and follow from the observations that
Physical interpretation of deformation tensors
Let
The undeformed length of the curve is given by
After deformation, the length becomes
Note that the right Cauchy–Green deformation tensor is defined as
Hence,
which indicates that changes in length are characterized by
Finite strain tensors
The concept of strain is used to evaluate how much a given displacement differs locally from a rigid body displacement. One of such strains for large deformations is the Lagrangian finite strain tensor, also called the Green-Lagrangian strain tensor or Green – St-Venant strain tensor, defined as
or as a function of the displacement gradient tensor
or
The Green-Lagrangian strain tensor is a measure of how much
The Eulerian-Almansi finite strain tensor, referenced to the deformed configuration, i.e. Eulerian description, is defined as
or as a function of the displacement gradients we have
Seth–Hill family of generalized strain tensors
B. R. Seth from the Indian Institute of Technology, Kharagpur was the first to show that the Green and Almansi strain tensors are special cases of a more general strain measure. The idea was further expanded upon by Rodney Hill in 1968. The Seth–Hill family of strain measures (also called Doyle-Ericksen tensors) can be expressed as
For different values of
The second-order approximation of these tensors is
where
Many other different definitions of tensors
An example is the set of tensors
which do not belong to the Seth–Hill class, but have the same 2nd-order approximation as the Seth–Hill measures at
Stretch ratio
The stretch ratio is a measure of the extensional or normal strain of a differential line element, which can be defined at either the undeformed configuration or the deformed configuration.
The stretch ratio for the differential element
where
Similarly, the stretch ratio for the differential element
The normal strain
This equation implies that the normal strain is zero, i.e. no deformation, when the stretch is equal to unity. Some materials, such as elastometers can sustain stretch ratios of 3 or 4 before they fail, whereas traditional engineering materials, such as concrete or steel, fail at much lower stretch ratios, perhaps of the order of 1.001 (reference?)
Physical interpretation of the finite strain tensor
The diagonal components
where
The off-diagonal components
where
Under certain circumstances, i.e. small displacements and small displacement rates, the components of the Lagrangian finite strain tensor may be approximated by the components of the infinitesimal strain tensor
Deformation tensors in curvilinear coordinates
A representation of deformation tensors in curvilinear coordinates is useful for many problems in continuum mechanics such as nonlinear shell theories and large plastic deformations. Let
The three tangent vectors at
Let us define a second-order tensor field
The Christoffel symbols of the first kind can be expressed as
To see how the Christoffel symbols are related to the Right Cauchy–Green deformation tensor let us define two sets of bases
The deformation gradient in curvilinear coordinates
Using the definition of the gradient of a vector field in curvilinear coordinates, the deformation gradient can be written as
The right Cauchy–Green tensor in curvilinear coordinates
The right Cauchy–Green deformation tensor is given by
If we express
Therefore
and the Christoffel symbol of the first kind may be written in the following form.
Some relations between deformation measures and Christoffel symbols
Let us consider a one-to-one mapping from
Then,
Noting that
and
Define
Hence
Define
Then
Define the Christoffel symbols of the second kind as
Then
Therefore
The invertibility of the mapping implies that
We can also formulate a similar result in terms of derivatives with respect to
Compatibility conditions
The problem of compatibility in continuum mechanics involves the determination of allowable single-valued continuous fields on bodies. These allowable conditions leave the body without unphysical gaps or overlaps after a deformation. Most such conditions apply to simply-connected bodies. Additional conditions are required for the internal boundaries of multiply connected bodies.
Compatibility of the deformation gradient
The necessary and sufficient conditions for the existence of a compatible
Compatibility of the right Cauchy–Green deformation tensor
The necessary and sufficient conditions for the existence of a compatible
We can show these are the mixed components of the Riemann–Christoffel curvature tensor. Therefore the necessary conditions for
Compatibility of the left Cauchy–Green deformation tensor
No general sufficiency conditions are known for the left Cauchy–Green deformation tensor in three-dimensions. Compatibility conditions for two-dimensional