
 | ||
In probability theory and statistics, a unit root is a feature of some stochastic processes that can cause problems in statistical inference involving time series models. A linear stochastic process has a unit root if 1 is a root of the process's characteristic equation. Such a process is non-stationary but does not always have a trend.
Contents
- Definition
- Example
- Related models
- Estimation when a unit root may be present
- Properties and characteristics of unit root processes
- Unit root hypothesis
- References
If the other roots of the characteristic equation lie inside the unit circle—that is, have a modulus (absolute value) less than one—then the first difference of the process will be stationary; otherwise, the process will need to be differenced multiple times to become stationary. Due to this characteristic, unit root processes are also called difference stationary.
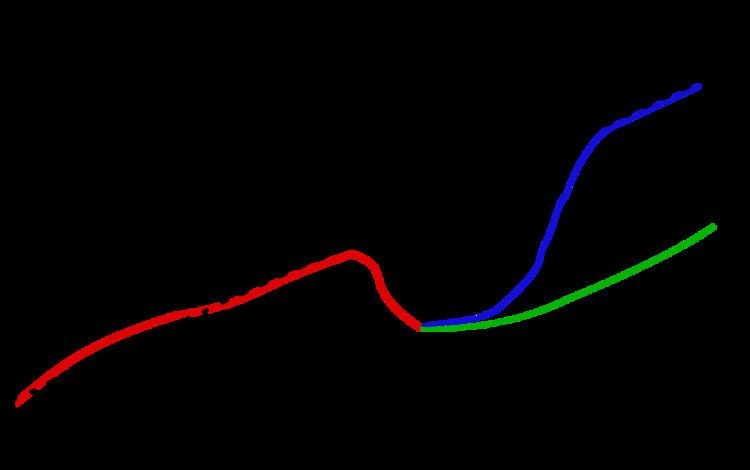
Unit root processes may sometimes be confused with trend-stationary processes; while they share many properties, they are different in many aspects. It is possible for a time series to be non-stationary, have no unit-root yet be trend-stationary. In both unit root and trend-stationary processes, the mean can be growing or decreasing over time; however, in the presence of a shock, trend-stationary processes are mean-reverting (i.e. transitory, the time series will converge again towards the growing mean, which was not affected by the shock) while unit-root processes have a permanent impact on the mean (i.e. no convergence over time).
If a root of the process's characteristic equation is larger than 1, then it is called an explosive process, even though such processes are often inaccurately called unit roots processes.
The presence of a unit root can be tested using a unit root test.
Definition
Consider a discrete-time stochastic process
Here,
then the stochastic process has a unit root or, alternatively, is integrated of order one, denoted
Example
The first order autoregressive model,
If the process has a unit root, then it is a non-stationary time series. That is, the moments of the stochastic process depend on
By repeated substitution, we can write
The variance depends on t since
There are various tests to check for the existence of a unit root, some of them are given by:
- The Dickey-Fuller test
- Testing the significance of more than one coefficients (f-test)
- The Phillips Peron Test (PP) unit root test
- Dickey Pantula test
Related models
In addition to AR and ARMA models, other important models arise in regression analysis where the model errors may themselves have a time series structure and thus may need to be modelled by an AR or ARMA process that may have a unit root, as discussed above. The finite sample properties of regression models with first order ARMA errors, including unit roots, have been analyzed.
Estimation when a unit root may be present
Often, ordinary least squares (OLS) is used to estimate the slope coefficients of the autoregressive model. Use of OLS relies on the stochastic process being stationary. When the stochastic process is non-stationary, the use of OLS can produce invalid estimates. Granger and Newbold called such estimates 'spurious regression' results: high R2 values and high t-ratios yielding results with no economic meaning.
To estimate the slope coefficients, one should first conduct a unit root test, whose null hypothesis is that a unit root is present. If that hypothesis is rejected, one can use OLS. However, if the presence of a unit root is not rejected, then one should apply the difference operator to the series. If another unit root test shows the differenced time series to be stationary, OLS can then be applied to this series to estimate the slope coefficients.
For example, in the AR(1) case,
In the AR(2) case,
is stationary if
If the process has multiple unit roots, the difference operator can be applied multiple times.
Properties and characteristics of unit-root processes
Unit root hypothesis
Economists debate whether various economic statistics, especially output, have a unit root or are trend stationary. A unit root process with drift is given in the first-order case by
where c is a constant term referred to as the "drift" term, and
where k is the slope of the trend and
The issue is particularly popular in the literature on business cycles. Research on the subject began with Nelson and Plosser whose paper on GNP and other output aggregates failed to reject the unit root hypothesis for these series. Since then, a debate—entwined with technical disputes on statistical methods—has ensued. Some economists argue that GDP has a unit root or structural break, implying that economic downturns result in permanently lower GDP levels in the long run. Other economists argue that GDP is trend-stationary: That is, when GDP dips below trend during a downturn it later returns to the level implied by the trend so that there is no permanent decrease in output. While the literature on the unit root hypothesis may consist of arcane debate on statistical methods, the hypothesis carries significant practical implications for economic forecasts and policies.