
 | ||
In mathematics, the Radon transform is the integral transform which takes a function f defined on the plane to a function Rf defined on the (two-dimensional) space of lines in the plane, whose value at a particular line is equal to the line integral of the function over that line. The transform was introduced in 1917 by Johann Radon, who also provided a formula for the inverse transform. Radon further included formulas for the transform in three dimensions, in which the integral is taken over planes (integrating over lines is known as the X-ray transform). It was later generalized to higher-dimensional Euclidean spaces, and more broadly in the context of integral geometry. The complex analog of the Radon transform is known as the Penrose transform.The Radon transform is widely applicable to tomography, the creation of an image from the projection data associated with cross-sectional scans of an object.
Contents
Explanation
If a function
The Radon transform data is often called a sinogram because the Radon transform of an off-center point source is a sinusoid. Consequently the Radon transform of a number of small objects appears graphically as a number of blurred sine waves with different amplitudes and phases.
The Radon transform is useful in computed axial tomography (CAT scan), barcode scanners, electron microscopy of macromolecular assemblies like viruses and protein complexes, reflection seismology and in the solution of hyperbolic partial differential equations.
Definition
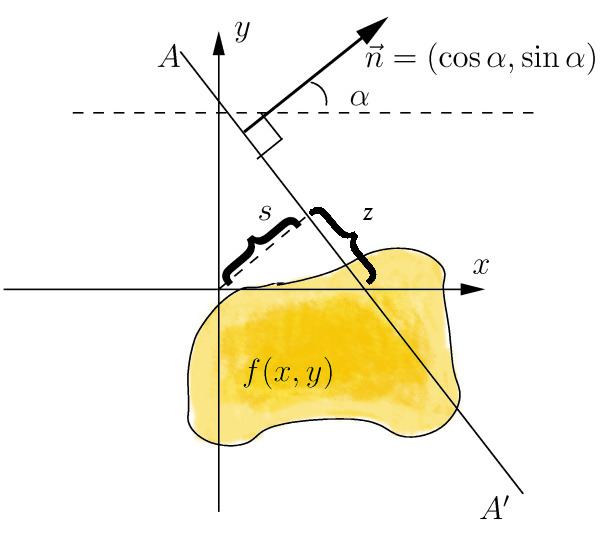
Let ƒ(x) = ƒ(x,y) be a compactly supported continuous function on R2. The Radon transform, Rƒ, is a function defined on the space of straight lines L in R2 by the line integral along each such line:
Concretely, the parametrization of any straight line L with respect to arc length z can always be written
where s is the distance of L from the origin and
More generally, in the n-dimensional Euclidean space Rn, the Radon transform of a compactly supported continuous function ƒ is a function Rƒ on the space Σn of all hyperplanes in Rn. It is defined by
for ξ ∈Σn, where the integral is taken with respect to the natural hypersurface measure, dσ (generalizing the |dx| term from the 2-dimensional case). Observe that any element of Σn is characterized as the solution locus of an equation
where α ∈ Sn−1 is a unit vector and s ∈ R. Thus the n-dimensional Radon transform may be rewritten as a function on Sn−1×R via
It is also possible to generalize the Radon transform still further by integrating instead over k-dimensional affine subspaces of Rn. The X-ray transform is the most widely used special case of this construction, and is obtained by integrating over straight lines.
Relationship with the Fourier transform
The Radon transform is closely related to the Fourier transform. For a function of one variable the Fourier transform is defined by
and for a function of a 2-vector
For convenience, denote
where
Thus the two-dimensional Fourier transform of the initial function along a line at the inclination angle
More generally, one has the result valid in n dimensions
Dual transform
The dual Radon transform is a kind of adjoint to the Radon transform. Beginning with a function g on the space Σn, the dual Radon transform is the function
The integral here is taken over the set of all hyperplanes incident with the point x ∈ Rn, and the measure dμ is the unique probability measure on the set
Concretely, for the two-dimensional Radon transform, the dual transform is given by
In the context of image processing, the dual transform is commonly called backprojection as it takes a function defined on each line in the plane and 'smears' or projects it back over the line to produce an image.
Intertwining property
Let Δ denote the Laplacian on Rn:
This is a natural rotationally invariant second-order differential operator. On Σn, the "radial" second derivative
is also rotationally invariant. The Radon transform and its dual are intertwining operators for these two differential operators in the sense that
Reconstruction approaches
The process of reconstruction produces the image (or function
Radon inversion formula
In the 2D case, the most commonly used analytical formula to recover
where
The convolution kernel
Ill-posedness
Intuitively, in the filtered backprojection formula, by analogy with differentiation, for which
A quantitive statement of the ill-posedness of Radon Inversion goes as follows:
We have
where
Thus for
The complex exponential
Iterative Reconstruction methods
Compared with the Filtered Backprojection method, iterative reconstruction costs large computation time, limiting its pratical use. However, due to the ill-posedness of Radon Inversion, the Filtered Backprojection method may be infeasible in the presence of discontinuity or noise. The iterative reconstruction could provide metal artifact reduction, noise and dose reduction for the reconstructed result that attract much research interest around the world.
Inversion formulas
Explicit and computationally efficient inversion formulas for the Radon transform and its dual are available. The Radon transform in n dimensions can be inverted by the formula
where
and the power of the Laplacian (−Δ)(n−1)/2 is defined as a pseudodifferential operator if necessary by the Fourier transform
For computational purposes, the power of the Laplacian is commuted with the dual transform R* to give
where Hs is the Hilbert transform with respect to the s variable. In two dimensions, the operator Hsd/ds appears in image processing as a ramp filter. One can prove directly from the Fourier slice theorem and change of variables for integration that for a compactly supported continuous function ƒ of two variables
Thus in an image processing context the original image ƒ can be recovered from the 'sinogram' data Rƒ by applying a ramp filter (in the
Explicitly, the inversion formula obtained by the latter method is
if n is odd, and
if n is even.
The dual transform can also be inverted by an analogous formula: