
 | ||
Packing problems are a class of optimization problems in mathematics that involve attempting to pack objects together into containers. The goal is to either pack a single container as densely as possible or pack all objects using as few containers as possible. Many of these problems can be related to real life packaging, storage and transportation issues. Each packing problem has a dual covering problem, which asks how many of the same objects are required to completely cover every region of the container, where objects are allowed to overlap.
Contents
- Packing infinite space
- Hexagonal packing of circles
- Sphere packings in higher dimensions
- Packings of Platonic solids in three dimensions
- Different Cuboids into a Cuboid
- Spheres into a Euclidean ball
- Spheres in a cuboid
- Identical spheres in a cylinder
- Circles in circle
- Circles in square
- Circles in isosceles right triangle
- Circles in equilateral triangle
- Squares in square
- Squares in circle
- Identical rectangles in a rectangle
- Different rectangles in a rectangle
- Related fields
- Packing of irregular objects
- References
In a Bin packing problem, you are given:
Usually the packing must be without overlaps between goods and other goods or the container walls. In some variants, the aim is to find the configuration that packs a single container with the maximal density. More commonly, the aim is to pack all the objects into as few containers as possible. In some variants the overlapping (of objects with each other and/or with the boundary of the container) is allowed but should be minimized.
Packing infinite space
Many of these problems, when the container size is increased in all directions, become equivalent to the problem of packing objects as densely as possible in infinite Euclidean space. This problem is relevant to a number of scientific disciplines, and has received significant attention. The Kepler conjecture postulated an optimal solution for packing spheres hundreds of years before it was proven correct by Thomas Callister Hales. Many other shapes have received attention, including ellipsoids, Platonic and Archimedean solids including tetrahedra, and unequal-sphere dimers.
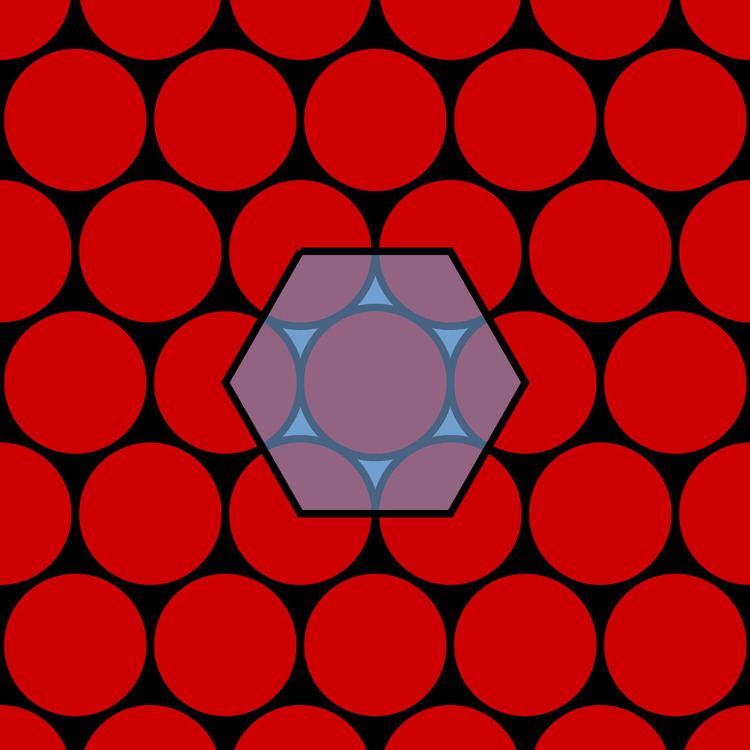
Hexagonal packing of circles
These problems are mathematically distinct from the ideas in the circle packing theorem. The related circle packing problem deals with packing circles, possibly of different sizes, on a surface, for instance the plane or a sphere.
The counterparts of a circle in other dimensions can never be packed with complete efficiency in dimensions larger than one (in a one-dimensional universe, the circle analogue is just two points). That is, there will always be unused space if you are only packing circles. The most efficient way of packing circles, hexagonal packing, produces approximately 91% efficiency.
Sphere packings in higher dimensions
In three dimensions, the face-centered cubic lattice offers the best lattice packing of spheres, and is believed to be the optimal of all packings. With 'simple' sphere packings in three dimensions ('simple' being carefully defined) there are nine possible defineable packings. The 8-dimensional E8 lattice and 24-dimensional Leech lattice have also been proven to be optimal in their respective real dimensional space.
Packings of Platonic solids in three dimensions
Cubes can easily be arranged to fill three-dimensional space completely, the most natural packing being the cubic honeycomb. No other Platonic solid can tile space on its own, but some preliminary results are known. Tetrahedra can achieve a packing of at least 85%. One of the best packings of regular dodecahedra is based on the aforementioned face-centered cubic (FCC) lattice.
Tetrahedra and octahedra together can fill all of space in an arrangement known as the tetrahedral-octahedral honeycomb.
Simulations combining local improvement methods with random packings suggest that the lattice packings for icosahedra, dodecahedra, and octahedra are optimal in the broader class of all packings.
Different Cuboids into a Cuboid
Determine the minimum number of cuboid containers (bins) that are required to pack a given set of item cuboids (3 Dimensional rectangles). The rectangular cuboids to be packed can be rotated by 90 degrees on each axis.
Spheres into a Euclidean ball
The problem of finding the smallest ball such that
To show that this configuration is optimal, let
Spheres in a cuboid
Determine the number of spherical objects of given diameter d can be packed into a cuboid of size a × b × c.
Identical spheres in a cylinder
Determine the minimum height h of a cylinder with given radius R that will pack n identical spheres of radius r (< R).
Circles in circle
Pack n unit circles into the smallest possible circle. This is closely related to spreading points in a unit circle with the objective of finding the greatest minimal separation, dn, between points.
Optimal solutions have been proven for n ≤ 13, and n = 19.
Circles in square
Pack n unit circles into the smallest possible square. This is closely related to spreading points in a unit square with the objective of finding the greatest minimal separation, dn, between points. To convert between these two formulations of the problem, the square side for unit circles will be L = 2 + 2/dn.
Optimal solutions have been proven for n ≤ 30.
Circles in isosceles right triangle
Pack n unit circles into the smallest possible isosceles right triangle. Good estimates are known for n<300.
Circles in equilateral triangle
Pack n unit circles into the smallest possible equilateral triangle. Optimal solutions are known for n<13, and conjectures are available for n < 28.
Squares in square
Pack n unit squares into the smallest possible square.
Optimal solutions have been proven for n = 1–10, 14–16, 22–25, 33–36, 62–64, 79–81, 98–100, and any square integer.
The wasted space is asymptotically O(a7/11).
Squares in circle
Pack n squares in the smallest possible circle.
Minimum solutions:
Identical rectangles in a rectangle
The problem of packing multiple instances of a single rectangle of size (l,w), allowing for 90° rotation, in a bigger rectangle of size (L,W) has some applications such as loading of boxes on pallets and, specifically, woodpulp stowage.
For example, it is possible to pack 147 rectangles of size (137,95) in a rectangle of size (1600,1230).
Different rectangles in a rectangle
The problem of packing multiple rectangles of varying widths and heights in an enclosing rectangle of minimum area (but with no boundaries on the enclosing rectangle's width or height) has an important application in combining images into a single larger image. A web page that loads a single larger image often renders faster in the browser than the same page loading multiple small images, due to the overhead involved in requesting each image from the web server.
An example of a fast algorithm that packs rectangles of varying widths and heights into an enclosing rectangle of minimum area is here.
Related fields
In tiling or tessellation problems, there are to be no gaps, nor overlaps. Many of the puzzles of this type involve packing rectangles or polyominoes into a larger rectangle or other square-like shape.
There are significant theorems on tiling rectangles (and cuboids) in rectangles (cuboids) with no gaps or overlaps:
An a × b rectangle can be packed with 1 × n strips iff n divides a or n divides b.de Bruijn's theorem: A box can be packed with a harmonic brick a × a b × a b c if the box has dimensions a p × a b q × a b c r for some natural numbers p, q, r (i.e., the box is a multiple of the brick.)The study of polyomino tilings largely concerns two classes of problems: to tile a rectangle with congruent tiles, and to pack one of each n-omino into a rectangle.
A classic puzzle of the second kind is to arrange all twelve pentominoes into rectangles sized 3×20, 4×15, 5×12 or 6×10.
Packing of irregular objects
Packing of irregular objects is a problem not lending itself well to closed form solutions; however, the applicability to practical environmental science is quite important. For example, irregularly shaped soil particles pack differently as the sizes and shapes vary, leading to important outcomes for plant species to adapt root formations and to allow water movement in the soil.