
 | ||
The mode is the value that appears most often in a set data. The mode of a discrete probability distribution is the value x at which its probability mass function takes its maximum value. In other words, it is the value that is most likely to be sampled. The mode of a continuous probability distribution is the value x at which its probability density function has its maximum value, so the mode is at the peak.
Contents
- Mode of a sample
- Use
- Uniqueness and definedness
- Properties
- Example for a skewed distribution
- Van Zwet condition
- Unimodal distributions
- Confidence interval for the mode with a single data point
- Statistical tests
- History
- References
Like the statistical mean and median, the mode is a way of expressing, in a (usually) single number, important information about a random variable or a population. The numerical value of the mode is the same as that of the mean and median in a normal distribution, and it may be very different in highly skewed distributions.
The mode is not necessarily unique to a given distribution, since the probability mass function or probability density function may take the same maximum value at several points x1, x2, etc. The most extreme case occurs in uniform distributions, where all values occur equally frequently. When a probability density function has multiple local maxima it is common to refer to all of the local maxima as modes of the distribution. Such a continuous distribution is called multimodal (as opposed to unimodal).
In symmetric unimodal distributions, such as the normal distribution, the mean (if defined), median and mode all coincide. For samples, if it is known that they are drawn from a symmetric distribution, the sample mean can be used as an estimate of the population mode.
Mode of a sample
The mode of a sample is the element that occurs most often in the collection. For example, the mode of the sample [1, 3, 6, 6, 6, 6, 7, 7, 12, 12, 17] is 6. Given the list of data [1, 1, 2, 4, 4] the mode is not unique - the dataset may be said to be bimodal, while a set with more than two modes may be described as multimodal.
For a sample from a continuous distribution, such as [0.935..., 1.211..., 2.430..., 3.668..., 3.874...], the concept is unusable in its raw form, since no two values will be exactly the same, so each value will occur precisely once. In order to estimate the mode, the usual practice is to discretize the data by assigning frequency values to intervals of equal distance, as for making a histogram, effectively replacing the values by the midpoints of the intervals they are assigned to. The mode is then the value where the histogram reaches its peak. For small or middle-sized samples the outcome of this procedure is sensitive to the choice of interval width if chosen too narrow or too wide; typically one should have a sizable fraction of the data concentrated in a relatively small number of intervals (5 to 10), while the fraction of the data falling outside these intervals is also sizable. An alternate approach is kernel density estimation, which essentially blurs point samples to produce a continuous estimate of the probability density function which can provide an estimate of the mode.
The following MATLAB (or Octave) code example computes the mode of a sample:
The algorithm requires as a first step to sort the sample in ascending order. It then computes the discrete derivative of the sorted list, and finds the indices where this derivative is positive. Next it computes the discrete derivative of this set of indices, locating the maximum of this derivative of indices, and finally evaluates the sorted sample at the point where that maximum occurs, which corresponds to the last member of the stretch of repeated values.
Use
Unlike mean and median, the concept of mode also makes sense for "nominal data" (i.e., not consisting of numerical values in the case of mean, or even of ordered values in the case of median). For example, taking a sample of Korean family names, one might find that "Kim" occurs more often than any other name. Then "Kim" would be the mode of the sample. In any voting system where a plurality determines victory, a single modal value determines the victor, while a multi-modal outcome would require some tie-breaking procedure to take place.
Unlike median, the concept of mode makes sense for any random variable assuming values from a vector space, including the real numbers (a one-dimensional vector space) and the integers (which can be considered embedded in the reals). For example, a distribution of points in the plane will typically have a mean and a mode, but the concept of median does not apply. The median makes sense when there is a linear order on the possible values. Generalizations of the concept of median to higher-dimensional spaces are the geometric median and the centerpoint.
Uniqueness and definedness
For some probability distributions, the expected value may be infinite or undefined, but if defined, it is unique. The mean of a (finite) sample is always defined. The median is the value such that the fractions not exceeding it and not falling below it are each at least 1/2. It is not necessarily unique, but never infinite or totally undefined. For a data sample it is the "halfway" value when the list of values is ordered in increasing value, where usually for a list of even length the numerical average is taken of the two values closest to "halfway". Finally, as said before, the mode is not necessarily unique. Certain pathological distributions (for example, the Cantor distribution) have no defined mode at all. For a finite data sample, the mode is one (or more) of the values in the sample.
Properties
Assuming definedness, and for simplicity uniqueness, the following are some of the most interesting properties.
Example for a skewed distribution
An example of a skewed distribution is personal wealth: Few people are very rich, but among those some are extremely rich. However, many are rather poor.
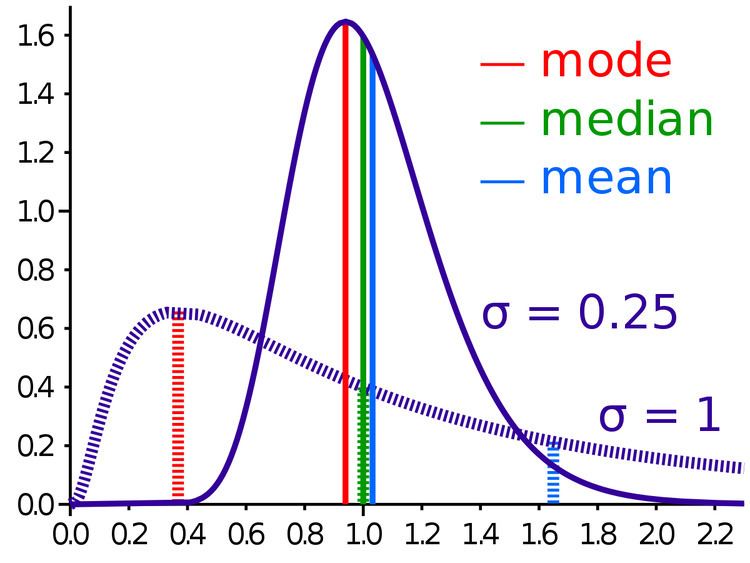
A well-known class of distributions that can be arbitrarily skewed is given by the log-normal distribution. It is obtained by transforming a random variable X having a normal distribution into random variable Y = eX. Then the logarithm of random variable Y is normally distributed, hence the name.
Taking the mean μ of X to be 0, the median of Y will be 1, independent of the standard deviation σ of X. This is so because X has a symmetric distribution, so its median is also 0. The transformation from X to Y is monotonic, and so we find the median e0 = 1 for Y.
When X has standard deviation σ = 0.25, the distribution of Y is weakly skewed. Using formulas for the log-normal distribution, we find:
Indeed, the median is about one third on the way from mean to mode.
When X has a larger standard deviation, σ = 1, the distribution of Y is strongly skewed. Now
Here, Pearson's rule of thumb fails.
Van Zwet condition
Van Zwet derived an inequality which provides sufficient conditions for this inequality to hold. The inequality
Mode ≤ Median ≤ Meanholds if
F( Median - x ) + F( Median + x ) ≥ 1for all x where F() is the cumulative distribution function of the distribution.
Unimodal distributions
It can be shown for a unimodal distribution that the median
where
A similar relation holds between the median and the mode: they lie within 31/2 ≈ 1.732 standard deviations of each other:
Confidence interval for the mode with a single data point
It is a common but false belief that from a single observation x we can not gain information about the variability in the population and that consequently that finite length confidence intervals for mean and/or variance are impossible even in principle.
It is possible for an unknown unimodal distribution to estimate a confidence interval for the mode with a sample size of 1. This was first shown by Abbot and Rosenblatt and extended by Blachman and Machol. This confidence interval can be sharpened if the distribution can be assumed to be symmetrical. It is further possible to sharpen this interval if the distribution is normally distributed.
Let the confidence interval be 1 - α. Then the confidence intervals for the general, symmetric and normally distributed variates respectively are
where X is the variate, θ is the mode and
These estimates are conservative. The confidence intervals for the mode at the 90% level given by these estimators are X ± 19 | X - θ |, X ± 9 | X - θ | and X ± 5.84 | X - θ | for the general, symmetric and normally distributed variates respectively. The 95% confidence interval for a normally distributed variate is given by X ± 10.7 | X - θ |. It may be worth noting that the mean and the mode coincide if the variates are normally distributed.
The 95% bound for a normally distributed variate has been improved and is now known to be X ± 9.68 | X - θ | The bound for a 99% confidence interval is X ± 48.39 | X - θ'|
Machol has shown that given a known density symmetrical about 0 that given a single sample value (x) that the 90% confidence intervals of population mean are
where ν is the population median.
If the precise form of the distribution is not known but it is known to be symmetrical about zero then we have
where X is the variate, μ is the population mean and a and k are arbitrary real numbers.
It is also possible to estimate a confidence interval for the standard deviation from a single observation if the distribution is symmetrical about 0. For a normal distribution the with an unknown variance and a single data point (X) the 90%, 95% and 99% confidence intervals for the standard deviation are [ 0, 8|X| ], [ 0, 17|X| ] and [ 0, 70|X| ]. These intervals may be shorted if the mean is known to be bounded by a multiple of the standard deviation.
If the distribution is known to be normal then it is possible to estimate a confidence interval for the mean and variance from a simple value. The 90% confidence intervals are
The confidence intervals can be estimated for any chosen range.
This method is not limited to the normal distribution but can be used with any known distribution.
Statistical tests
These estimators have been used to create hypothesis tests for simple samples from normal or symmetrical unimodal distributions. Let the distribution have an assumed mean ( μ0 ). The null hypothesis is that the assumed mean of the distribution lies within the confidence interval of the sample mean ( m ). The null hypothesis is accepted if
where x is the value of the sample and k is a constant. The null hypothesis is rejected if
The value of k depends on the choice of confidence interval and the nature of the assumed distribution.
If the distribution is assumed or is known to be normal then the values of k for the 50%, 66.6%, 75%, 80%, 90%, 95% and 99% confidence intervals are 0.50, 1.26, 1.80, 2.31, 4.79, 9.66 and 48.39 respectively.
If the distribution is assumed or known to be unimodal and symmetrical but not normal then the values of k for the 50%, 66.6%, 75%, 80%, 90%, 95% and 99% confidence intervals are 0.50, 1.87, 2.91, 3.94, 8.97, 18.99, 99.00 respectively.
To see how this test works we assume or know a priori that the population from which the sample is drawn has a mean of μ0 and that the population has a symmetrical unimodal distribution - a class that includes the normal distribution. We wish to know if the mean estimated from the sample is representative of the population at a pre chosen level of confidence.
Assume that the distribution is normal and let the confidence interval be 95%. Then k = 9.66.
Assuming that the sample is representative of the population, the sample mean ( m ) will then lie within the range determined from the formula:
If subsequent sampling shows that the sample mean lies outside these parameters the sample mean is to be considered to differ significantly from the population mean.
History
The term mode originates with Karl Pearson in 1895.