
 | ||
In computer science, a heap is a specialized tree-based data structure that satisfies the heap property: If A is a parent node of B, then the key (the value) of node A is ordered with respect to the key of node B with the same ordering applying across the heap. A heap can be classified further as either a "max heap" or a "min heap". In a max heap, the keys of parent nodes are always greater than or equal to those of the children and the highest key is in the root node. In a min heap, the keys of parent nodes are less than or equal to those of the children and the lowest key is in the root node.
Contents
- Operations
- Implementation
- Comparison of theoretic bounds for variants
- Applications
- Implementations
- References
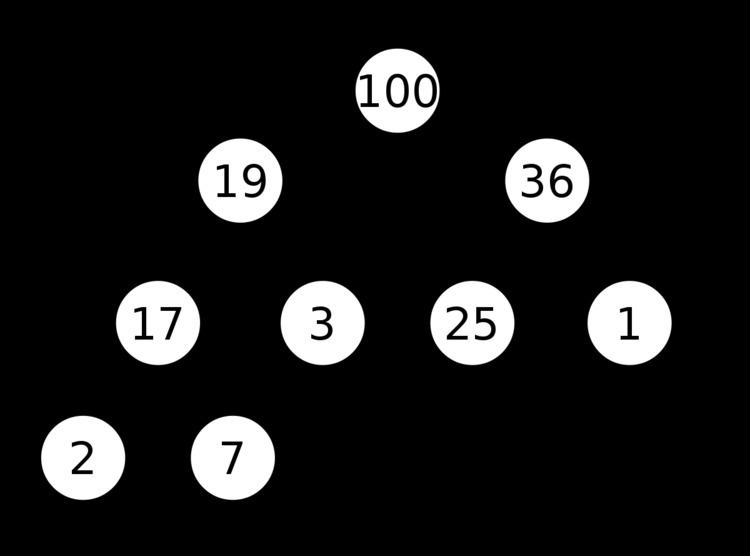
The heap is one maximally efficient implementation of an abstract data type called a priority queue, and in fact priority queues are often referred to as "heaps", regardless of how they may be implemented. A common implementation of a heap is the binary heap, in which the tree is a complete binary tree (see figure). The heap data structure, specifically the binary heap, was introduced by J. W. J. Williams in 1964, as a data structure for the heapsort sorting algorithm. Heaps are also crucial in several efficient graph algorithms such as Dijkstra's algorithm. In a heap, the highest (or lowest) priority element is always stored at the root. A heap is not a sorted structure and can be regarded as partially ordered. As visible from the heap-diagram, there is no particular relationship among nodes on any given level, even among the siblings. When a heap is a complete binary tree, it has a smallest possible height—a heap with N nodes always has log N height. A heap is a useful data structure when you need to remove the object with the highest (or lowest) priority.
Note that, as shown in the graphic, there is no implied ordering between siblings or cousins and no implied sequence for an in-order traversal (as there would be in, e.g., a binary search tree). The heap relation mentioned above applies only between nodes and their parents, grandparents, etc. The maximum number of children each node can have depends on the type of heap, but in many types it is at most two, which is known as a binary heap.
Operations
The common operations involving heaps are:
Implementation
Heaps are usually implemented in an array (fixed size or dynamic array), and do not require pointers between elements. After an element is inserted into or deleted from a heap, the heap property may be violated and the heap must be balanced by internal operations.
Full and almost full binary heaps may be represented in a very space-efficient way (as an implicit data structure) using an array alone. The first (or last) element will contain the root. The next two elements of the array contain its children. The next four contain the four children of the two child nodes, etc. Thus the children of the node at position n would be at positions 2n and 2n + 1 in a one-based array, or 2n + 1 and 2n + 2 in a zero-based array. This allows moving up or down the tree by doing simple index computations. Balancing a heap is done by sift-up or sift-down operations (swapping elements which are out of order). As we can build a heap from an array without requiring extra memory (for the nodes, for example), heapsort can be used to sort an array in-place.
Different types of heaps implement the operations in different ways, but notably, insertion is often done by adding the new element at the end of the heap in the first available free space. This will generally violate the heap property, and so the elements are then sifted up until the heap property has been reestablished. Similarly, deleting the root is done by removing the root and then putting the last element in the root and sifting down to rebalance. Thus replacing is done by deleting the root and putting the new element in the root and sifting down, avoiding a sifting up step compared to pop (sift down of last element) followed by push (sift up of new element).
Construction of a binary (or d-ary) heap out of a given array of elements may be performed in linear time using the classic Floyd algorithm, with the worst-case number of comparisons equal to 2N − 2s2(N) − e2(N) (for a binary heap), where s2(N) is the sum of all digits of the binary representation of N and e2(N) is the exponent of 2 in the prime factorization of N. This is faster than a sequence of consecutive insertions into an originally empty heap, which is log-linear (or linearithmic).
Comparison of theoretic bounds for variants
In the following time complexities O(f) is an asymptotic upper bound and Θ(f) is an asymptotically tight bound (see Big O notation). Function names assume a min-heap.
Applications
The heap data structure has many applications.
Implementations
java.util.PriorityQueue in the Java Collections Framework. This class implements by default a min-heap; to implement a max-heap, programmer should write a custom comparator. There is no support for the decrease/increase-key operation.