
 | ||
The Hyperloop Pod Competition is an incentive prize competition sponsored by SpaceX that is being held in 2015–2017 where a number of student and non-student teams are participating to design—and for some, build—a subscale prototype transport vehicle to demonstrate technical feasibility of various aspects of the Hyperloop concept. The competition is open to participants globally, although all judging has occurred in the United States.
Contents
- History
- Technical overview
- Test track
- Specifications
- Vehicle pods
- Competing teams
- Phase 1 Design weekend January 2016
- Phase 2 Test track runs January 2017
- Competition II mid year 2017
- References
There are two judging phases in the 2016–2017 competition: a design competition that was held in January 2016 and an on-track competition being held 27–29 January 2017. 30 of the 115 teams that submitted designs in January 2016 were selected to build hardware to compete on a sponsored Hyperloop test track in January 2017. There were more than 1,000 applicants at earlier stages of the competition.
The first competition completed in January 2017. Subsequent SpaceX-sponsored competitions are expected.
History
The outline of the original Hyperloop concept was made public in August 2013 by the release of a preliminary—or alpha level—design document by Elon Musk, with substantial design assistance from an informal group of engineers at both Tesla Motors and SpaceX who worked on the conceptual foundation and modelling of Hyperloop. The preliminary design called for a 2.3–3.4-meter-diameter (90–132 in) steel tube, operating in partial vacuum (nearly airless), utilizing pressurized vehicle "pods" to carry passengers or cargo that would ride on an air cushion driven by linear induction motors and air compressors. The alpha design included a notional route running from the Los Angeles region to the San Francisco Bay Area, paralleling the Interstate 5 corridor for most of its length, so that preliminary economic analysis might be done on the concept. Responses to the design paper release included: "a flash of brilliance" and "hypercool" to "nothing new here" to "hype", "another science-fiction dream," and "completely impractical."
Within days of the 2013 announcement, discussions concluded that building a successful Hyperloop subscale demonstration project could reduce the political impediments while improving cost estimates; Musk suggested that he could choose to become personally involved in building a demonstration prototype of the Hyperloop concept, including funding the development effort.
On 15 June 2015, SpaceX announced that they would sponsor a Hyperloop pod design competition, and would build a 1-mile-long (1.6 km) subscale test track near SpaceX's headquarters in Hawthorne, California, for the competitive event. The competition could be held as early as June 2016. SpaceX stated in their announcement, "Neither SpaceX nor Elon Musk is affiliated with any Hyperloop companies. While we are not developing a commercial Hyperloop ourselves, we are interested in helping to accelerate development of a functional Hyperloop prototype." More than 700 teams had submitted preliminary applications by July.
Detailed competition rules were released on 29 August 2015, with revisions in October. Formal Intent to Compete submissions were due 15 September 2015 and the detailed tube and technical specification—anticipated to be released by SpaceX in October 2015—became available somewhat later. A preliminary design briefing was held in November 2015, and as of October 2015, Final Design Packages were due on 13 January 2016. A Design Weekend was held at Texas A&M University on 29–30 January 2016 for all invited entrants. The selected pods will compete at the SpaceX Hyperloop Test Track in January 2017.
More than 120 student engineering teams were selected from the preliminary design briefing presentations in November to submit final design packages in January 2016. The designs were released to public view prior to the end of January 2016, and selected teams were invited to build hardware and compete in time trials in mid-2016.
SpaceX announced in January 2016 that they had engaged a Los Angeles-based, Fortune-500, engineering design and construction firm AECOM to build the Hyperloop test track.
At a 29–30 January 2016 meeting at Texas A&M, the designs from the approximately 120 worldwide teams were reviewed and judged. 30 teams were selected to go forward and build prototype Hyperloop pods for the competition later in the year.
On 30 January 2016, Musk announced that, due to the level of sophistication of the pod designs as well as design issues with economical design approaches to building the test track, "given this level of enthusiasm, there is no question we are going to have another Hyperloop competition." Further information came in August 2016: teams sign-up deadline is 30 September 2016 to compete in the second pod competition sometime in 2017.
TechCrunch published a photograph of the pod competition test track while under construction in September 2016. Competition teams visited the track for fit checks and vacuum/track tests during the first week of November, and a video was released.
The on-track portion of the competition finally got underway on 27 January 2017.
Technical overview
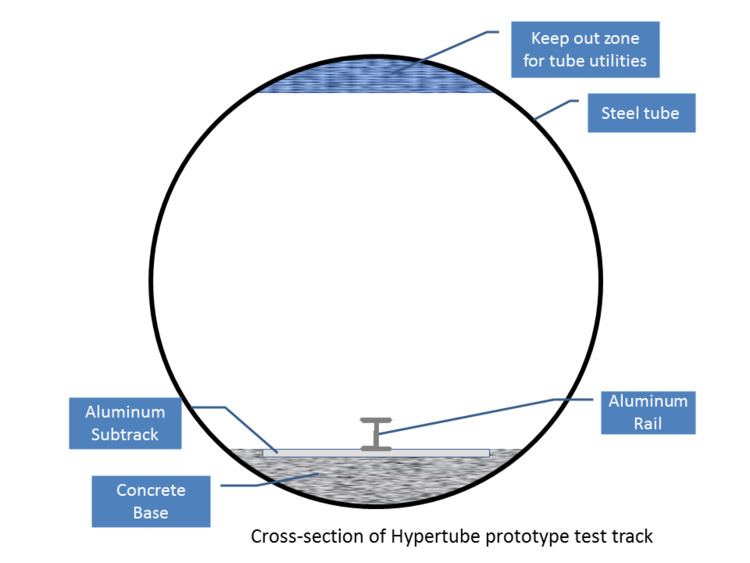
The 2016 competition will take place on a 1-mile-long (1.6 km), 1.8-meter-diameter (6 ft) test track being built in southern California. Test pods may not carry any human or animal, and are to be used solely to develop new technologies and subsystems for effecting higher-velocity tube transport systems. The track will facilitate pod test runs where each pod is accelerated, achieves a top measured speed that is reported in real-time, and then decelerates by braking, ostensibly before the end of the test track. There will be a crash pit after the end of the track to absorb the energy of any test pods that fail to come to a stop in the test track tube.
Test track
The SpaceX Hyperloop test track — or Hypertube — was designed in 2015 and was constructed in 2016, reaching its full length of one mile by October 2016. The test track itself is also a prototype, where SpaceX anticipates learning from the design, build process and evaluates how to apply automated construction techniques to future Hyperloop tracks.
The design of the pod test track varies significantly from the Hyperloop tube design shown in the initial alpha-level Hyperloop design concept document released in 2013. The Hypertube test track is designed to enable competitors who implement a wide array of designs and build pods that will test a variety of subsystem technologies that are important to new vehicle transport systems. This will include Hyperloop-specific pods—with air-bearing suspension and low-pressure compressor designs—as well as wheeled vehicle and magnetic levitation rail designs that will support a wide array of vehicle technologies to be tested. Some pods are expected to test only particular subsystems rather than a full Hyperloop-capable pod vehicle design; as well, many pods will have no on-pod compressor to prevent the high-speed choked-flow problem, very unlike the Hyperloop alpha design.
Multiple systems will be allowed for propulsion and for levitation/suspension of various team pods. Three explicit suspension types are called out: wheels, air bearings, and magnetic levitation. Pod propulsion may be On-pod—as envisioned in the alpha Hyperloop design—or for the Hypertube test track, may use a SpaceX-provided Pusher to accelerate pods up to speed in the first 15 percent of track length, or even be unique (team-specific) Off-pod propulsion systems that would need to be integrated into the Hypertube for that Pod's specific test run.
Specifications
The test track specifications as of January 2016 include:
Vehicle pods
Three different variations of exterior design of the vehicle pods for the Hyperloop are being explored. One Pod design uses Magnetic levitation; this design was used by the winner of the “Best Overall Design Award” MIT. The other major design variation is the Air bearing design. This design relies on a system to create a bed of air for the Pod to glide on and is the basis of Elon Musk’s original Hyperloop idea. The third design is used by University of Colorado, Denver's Hyperlynx team. Their design utilizes high speed wheels for speed under 100 Miles Per Hour and air bearings for higher speeds.
The inside design of the pods vary by team. Some of the teams are solely building pods designed for cargo transport. Other teams designed pods to transport passengers, while other designs would allow adjustments to be made to the pod to allow both, while MIT's team's initial design did not have room for a passenger or cargo and solely relied on the engineering of the pod. The University of Colorado, Denver's team incorporated a removable capsule that allows it to be exchanged for a cargo hold or passenger space. New York University's team has created a vehicle that only allows cargo transportation.
Competing teams
Teams advancing to the prototype hardware build stage for 2016 include representatives from four continents and at least six countries. The selected teams include:
Phase 1: Design weekend (January 2016)
Five design awards were assigned following the January design weekend.
MIT Hyperloop Team's design was awarded received the "Best Overall Design Award", among the 23 designs selected to move to the prototype stage. The design proposes a 250 kg (551 lb) pod with a carbon fiber and polycarbonate sheet exterior. It is elevated by a passive magnetic levitation system comprising 20 neodymium magnets that will maintain a 15 mm (0.6 in) distance above the track. The team says with air pressure at 140 Pascals, the pod could accelerate at 2.4 G and have 2 Newton aerodynamic drag when traveling at 110 m/s. The design includes a fail-safe braking system that automatically halts the pod should the actuators or computers fail, and low speed emergency drive wheels that can move the pod 1 m/s.
Delft Hyperloop received a "Pod Innovation Award", while Badgerloop, Hyperloop at Virginia Tech, and HyperXite at UC Irvine each received a "Pod Technical Excellence Award".
In addition to the five pod awards above, nine subsystem awards and three "design only" awards were given to teams, most to teams that were not chosen to continue on to the on-track competition. Technical awards for outstanding technical merit in subsystem and design, based on "innovation and uniqueness of subsystem design, full Hyperloop system applicability and economics; level of design detail; strength of supporting analysis and tests; and quality of documentation and presentation."
Best Overall Subsystem Award: Auburn University Hyperloop Team, Auburn University; Special Innovation Award in the Other Subsystem: RIT Imaging, Rochester Institute of Technology; :Levitation Subsystem Technical Excellence Award: TAMU Aerospace Hyperloop, Texas A&M; Braking Subsystem Technical Excellence Award: VicHyper, RMIT University; Propulsion/Compression Subsystem Technical Excellence Award: Makers UPV Team, Universitat Politècnica de València; Safety Subsystem Technical Excellence Award: UWashington Hyperloop, University of Washington (linked above); Subsystem Technical Excellence Awards: Hyped, University of Edinburgh; Conant Hyperloop Club, Conant High School; Subsystem Innovation Award: Ryerson’s International Hyperloop Team, Ryerson University. Top Design Concept Award: Makers UPV Team (see above); Design Concept Innovation Award: Nova Hyperloop Team, University of Cairo; Design Concept Innovation Award: Auburn University Hyperloop Team (see above).
Phase 2: Test track runs (January 2017)
Phase 2 of the competition ran 27–29 January 2017 after previously being planned for as early as August 2016. 27 teams competed in two overall categories and five subcategories. Each pod in the competition needed to progress through ten sequential tests, only the last of which would be a vacuum-environment speed run in the mile-long Hypertube. Problems with dust and misalignment of the track limited performance and caused widespread problems. Just three of the competition pods successfully completed the nine tests that enabled them to make a vacuumized tube run on 29 January. The winning teams were:
Competition II (mid-year 2017)
SpaceX has indicated that a "Hyperloop Pod Competition II" would occur in mid-year 2017, approximately six months after the Phase 2 runs on the test track for the 2016-2017 Competition I. The rules for Competition II were released in August 2016.Unlike Competition I—where multiple judging criteria were used and multiple classes of vehicles and vehicle subsystems were judged—Competition II will be judged by only a single criterium: "maximum speed with successful deceleration (i.e. without crashing)."