
 | ||
Fusion adaptive resonance theory (fusion ART) is a generalization of self-organizing neural networks known as Adaptive Resonance Theory for learning recognition categories (or cognitive codes) across multiple pattern channels. It unifies a number of neural network models, supports a myriad of learning paradigms, notably unsupervised learning, supervised learning, and reinforcement learning, and can be applied for domain knowledge integration, memory representation, and modelling of high level cognition.
Contents
Overview
Fusion adaptive resonance theory models is a natural extension of the original adaptive resonance theory (ART) models developed by Stephen Grossberg and Gail A. Carpenter from a single pattern field to multiple pattern channels. Whereas the original ART models perform unsupervised learning of recognition nodes in response to incoming input patterns, fusion ART learns multi-channel mappings simultaneously across multi-modal pattern channels in an online and incremental manner.
The learning model
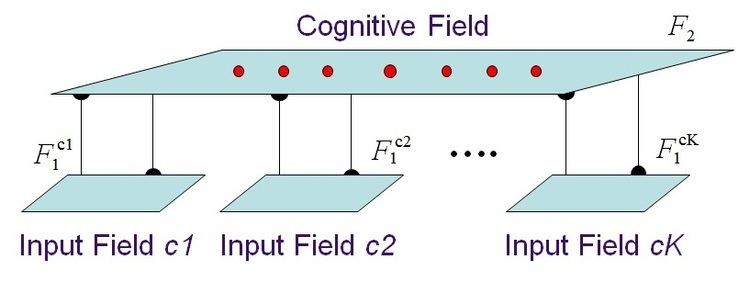
Fusion ART employs a multi-channel architecture (as shown below), comprising a category field
Given a set of multimodal patterns, each presented at a pattern channel, the fusion ART pattern encoding cycle comprises five key stages, namely code activation, code competition, activity readout, template matching, and template learning, as described below.
Types of fusion ART
The network dynamics described above can be used to support a myriad of learning operations. We show how fusion ART can be used for a variety of traditionally distinct learning tasks in the subsequent sections.
Original ART models
With a single pattern channel, the fusion ART architecture reduces to the original ART model. Using a selected vigilance value $ho$, an ART model learns a set of recognition nodes in response to an incoming stream of input patterns in a continuous manner. Each recognition node in the
Adaptive resonance associative map
By synchronizing pattern coding across multiple pattern channels, fusion ART learns to encode associative mappings across distinct pattern spaces. A specific instance of fusion ART with two pattern channels is known as adaptive resonance associative map (ARAM), that learns multi-dimensional supervised mappings from one pattern space to another pattern space. An ARAM system consists of an input field
Fuzzy ARAM, based on fuzzy ART operations, has been successfully applied to numerous machine learning tasks, including personal profiling, document classification, personalized content management, and DNA gene expression analysis. In many benchmark experiments, ARAM has demonstrated predictive performance superior to those of many state-of-the-art machine learning systems, including C4.5, Backpropagation Neural Network, K Nearest Neighbour, and Support Vector Machines.
Fusion ART with domain knowledge
During learning, fusion ART formulates recognition categories of input patterns across multiple channels. The knowledge that fusion ART discovers during learning, is compatible with symbolic rule-based representation. Specifically, the recognition categories learned by the
The fusion ART rule insertion strategy is similar to that used in Cascade ARTMAP, a generalization of ARTMAP that performs domain knowledge insertion, refinement, and extraction. For direct knowledge insertion, the IF and THEN clauses of each instruction (rule) is translated into a pair of vectors A and B respectively. The vector pairs derived are then used as training patterns for inserting into a fusion ART network. During rule insertion, the vigilance parameters are set to 1s to ensure that each distinct rule is encoded by one category node.
For details on integrating domain knowledge into fusion ART, please refer to a recent paper.
Fusion architecture for learning and cognition (FALCON)
Reinforcement learning is a paradigm wherein an autonomous system learns to adjust its behaviour based on reinforcement signals received from the environment. An instance of fusion ART, known as FALCON (fusion architecture for learning and cognition), learns mappings simultaneously across multi-modal input patterns, involving states, actions, and rewards, in an online and incremental manner. Compared with other ART-based reinforcement learning systems, FALCON presents a truly integrated solution in the sense that there is no implementation of a separate reinforcement learning module or Q-value table. Using competitive coding as the underlying principle of computation, the network dynamics encompasses a myriad of learning paradigms, including unsupervised learning, supervised learning, as well as reinforcement learning.
FALCON employs a three-channel architecture, comprising a category field
The general sense-act-learn algorithm for TD-FALCON is summarized. Given the current state s, the FALCON network is used to predict the value of performing each available action a in the action set A based on the corresponding state vector