
Mission duration Planned: 1+ year Launch mass 4,100 kg (9,000 lb) | ||
 | ||
Website sci.esa.int/bepicolombo/ | ||
BepiColombo is a joint mission of the European Space Agency (ESA) and the Japan Aerospace Exploration Agency (JAXA) to the planet Mercury. The mission comprises two satellites to be launched together: the Mercury Planetary Orbiter (MPO) and the Mercury Magnetospheric Orbiter (MMO). The mission will perform a comprehensive study on Mercury, including its magnetic field, magnetosphere, interior structure and surface. It is scheduled to launch in October 2018, with an arrival at Mercury planned for December 2025, after a flyby of Earth, two flybys of Venus, and six flybys of Mercury. The mission was approved in February 2007, after years in proposal and planning as part of the European Space Agency's Horizon 2000+ program; it will be the last mission of the program to be launched.
Contents
Mission
BepiColombo is named after Giuseppe "Bepi" Colombo (1920–1984), a scientist, mathematician and engineer at the University of Padua, Italy, who first implemented the interplanetary gravity-assist manoeuvre during the 1974 Mariner 10 mission, a technique now commonly used by planetary probes.
The mission involves three components:
The prime contractor for ESA is Airbus Defence and Space. ESA is responsible for the overall mission, the design, development assembly and test of the propulsion and MPO modules, and the launch. The two orbiters are planned to be launched together on an Ariane 5 launch vehicle in October 2018. The spacecraft will have a seven-year interplanetary cruise to Mercury using solar-electric propulsion (ion thrusters) and gravity assists from Earth, Venus and eventual gravity capture at Mercury. ESA's Cebreros 35-metre ground station is planned to be the primary ground facility for communications during all mission phases.
Arriving in Mercury orbit on 5 December 2025, the MMO and MPO satellites will separate and observe Mercury in collaboration for one year, with a possible one-year extension. The orbiters will be equipped with scientific instruments provided by various European countries and Japan. They will characterise the huge liquid iron core ( 3⁄4 of the planet's radius) and will complete gravitational and magnetic field mappings. Russia will provide a gamma ray and neutron spectrometers to verify the existence of water ice in polar craters that are permanently in shadow from the Sun's rays.
Mercury is too small and hot for its gravity to retain any significant atmosphere over long periods of time; it does have a "tenuous surface-bounded exosphere" containing hydrogen, helium, oxygen, sodium, calcium, potassium and others. Its exosphere is not stable; atoms are continuously lost and replenished from a variety of sources, and the mission will study its composition and dynamics, including generation and disappearance.
Objectives
The main objectives of the mission are:
Mission design
The spacecraft will have a seven-year interplanetary cruise to Mercury using solar-electric propulsion and nine gravity assists, flying past the Earth and Moon in April 2020, Venus in 2020 and 2021, and six Mercury flybys between 2021 and 2025.
The spacecraft will leave Earth with an hyperbolic excess velocity of 3.475 km/s (2.159 mi/s). After two years, it returns to Earth to perform a gravity-assist manoeuvre and is deflected towards Venus. Two consecutive Venus flybys reduce the perihelion to Mercury distance with almost no need for thrust. A sequence of six Mercury flybys will lower the relative velocity to 1.76 km/s (1.09 mi/s). Four final thrust arcs further reduce the relative velocity to the point where Mercury will capture the spacecraft on 5 December 2025 into polar orbit; the spacecraft then will be lowered using chemical thrusters.
The planned mission schedule is:
Mercury Transfer Module
The Mercury Transfer Module (MTM) is at the base of the 'stack' and provides propulsion for Earth-Mercury transfer and to slow down its approach to Mercury. It carries no significant scientific instruments.
The Transfer Module is equipped with two propulsion systems: a solar electric ion drive engine and a standard bipropellant chemical propulsion system using MMH / MON3. The chemical propulsion system will be used for Earth escape and then it will be pyrotechnically isolated, and the solar electric ion engine will take over for the cruise phase. The twin QinetiQ T6 ion thrusters operate at maximum combined throttle of 290 mN. The MTM supplies electrical power for the two hibernating orbiters as well as for its solar electric propulsion system.
The solar electric propulsion will be used for the cruise phase. The ion drives have very high specific impulse and very low thrust. This leads to a flight profile with long continuous low-thrust braking to gradually reduce the velocity of the spacecraft. Moments before Mercury orbit insertion, the MTM will be jettisoned from the spacecraft stack.
Mercury Planetary Orbiter
The Mercury Planetary Orbiter (MPO) will have a mass of 1,150 kg (2,540 lb) and will have its sides covered with solar cells providing 150 W at perihelion. A radiator with an area of 1.5 m2 (16 sq ft) is mounted on one side to provide thermal control. The radiator is always pointed away from the Sun and is protected from planetary infrared heat with a 3.4 m2 (37 sq ft) shield. High efficiency insulation is also used. The configuration and thermal design will provide a stable temperature for internally mounted instruments.
A high-temperature-resistant 1.0 m (3.3 ft) diameter high-gain antenna is mounted on a short boom on the zenith side of the spacecraft. Communications will be on the X and Ka band with an average bit rate of 50 kbit/s and a total data volume of 1550 Gb/year. After its arrival, the MMO will be separated by spin-ejection, will be three-axis stabilized and nadir pointing. Navigation is facilitated by three star sensors. After its release in Mercury orbit, the MPO will be operated by Sagamihara Space Operation Center using Usuda Deep Space Center's 64 m (210 ft) antenna located in Nagano, Japan.
Scientific payload
The scientific payload of the Mercury Planetary Orbiter consists of eleven instruments:
Mercury Magnetospheric Orbiter
The Mercury Magnetospheric Orbiter (MMO), developed and built mostly by Japan, has the shape of a short octagonal cylinder, 180 cm (71 in) long from face to face and 90 cm (35 in) high. It has a total mass of 285 kg (628 lb), including a 45 kg (99 lb) scientific payload.
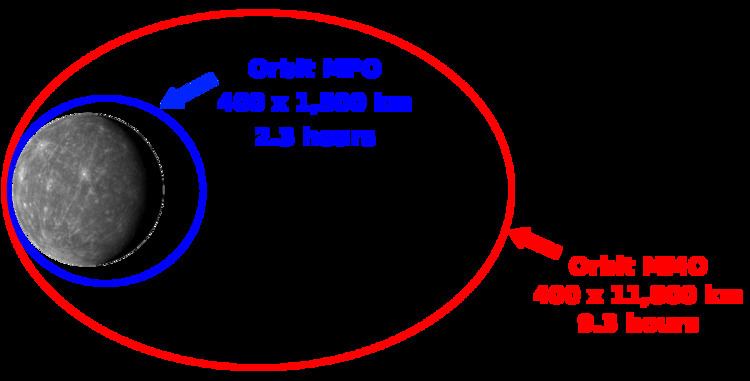
The MMO is spin stabilized at 15 rpm with the spin axis perpendicular to the equator of Mercury and it will enter polar orbit at an altitude of 590 × 11,640 km (370 × 7,230 mi), outside of MPO's orbit. The top and bottom of the octagon act as radiators with louvers for active temperature control. The sides are covered with solar cells which provide 90 W. Communications with Earth will be through a 0.8 m (2.6 ft) diameter X band phased array high-gain antenna and two medium-gain antennas operating in the X band. Telemetry will return 160 Gb/year, about 5 kbit/s over the lifetime of the spacecraft, which is expected to be greater than one year. The reaction and control system is based on cold gas thrusters.
Scientific payload
The Mercury Magnetospheric Orbiter will carry five groups of instruments with a total scientific payload mass of 45 kg (99 lb):
Mercury Surface Element
The Mercury Surface Element (MSE) was cancelled in 2003 due to budgetary constraints. At the time of cancellation, MSE was meant to be a small, 44 kg (97 lb), lander designed to operate for about one week on the surface of Mercury. Shaped as a 0.9 m (3.0 ft) diameter disc, it was designed to land at a latitude of 85° near the terminator region. Braking manoeuvres would bring the lander to zero velocity at an altitude of 120 m (390 ft) at which point the propulsion unit would be ejected, the airbags inflated, and the module would fall to the surface with a maximum impact velocity of 30 m/s (98 ft/s). Scientific data would be stored onboard and relayed via a cross-dipole UHF antenna to either the MPO or MMO. The MSE would have carried a 7 kg (15 lb) payload consisting of an imaging system (a descent camera and a surface camera), a heat flow and physical properties package, an alpha particle X-ray spectrometer, a magnetometer, a seismometer, a soil penetrating device (mole), and a micro-rover.