
 | ||
In control theory, a state observer is a system that provides an estimate of the internal state of a given real system, from measurements of the input and output of the real system. It is typically computer-implemented, and provides the basis of many practical applications.
Contents
- Discrete time case
- Continuous time case
- Peaking and other observer methods
- State observers for nonlinear systems
- Linearizable error dynamics
- Sliding mode observer
- Multi Observer
- Bounding observers
- References
Knowing the system state is necessary to solve many control theory problems; for example, stabilizing a system using state feedback. In most practical cases, the physical state of the system cannot be determined by direct observation. Instead, indirect effects of the internal state are observed by way of the system outputs. A simple example is that of vehicles in a tunnel: the rates and velocities at which vehicles enter and leave the tunnel can be observed directly, but the exact state inside the tunnel can only be estimated. If a system is observable, it is possible to fully reconstruct the system state from its output measurements using the state observer.
Discrete-time case
The state of a linear, time-invariant physical discrete-time system is assumed to satisfy
where, at time
The observer model of the physical system is then typically derived from the above equations. Additional terms may be included in order to ensure that, on receiving successive measured values of the plant's inputs and outputs, the model's state converges to that of the plant. In particular, the output of the observer may be subtracted from the output of the plant and then multiplied by a matrix
The observer is called asymptotically stable if the observer error
For control purposes the output of the observer system is fed back to the input of both the observer and the plant through the gains matrix
The observer equations then become:
or, more simply,
Due to the separation principle we know that we can choose
Continuous-time case
The previous example was for an observer implemented in a discrete-time LTI system. However, the process is similar for the continuous-time case; the observer gains
For a continuous-time linear system
where
The observer error
The eigenvalues of the matrix
Peaking and other observer methods
When the observer gain
State observers for nonlinear systems
Sliding mode observers can be designed for the non-linear systems as well. For simplicity, first consider the no-input non-linear system:
where
There are several non-approximate approaches for designing an observer. The two observers given below also apply to the case when the system has an input. That is,
Linearizable error dynamics
One suggestion by Krener and Isidori and Krener and Respondek can be applied in a situation when there exists a linearizing transformation (i.e., a diffeomorphism, like the one used in feedback linearization)
The Luenberger observer is then designed as
The observer error for the transformed variable
As shown by Gauthier, Hammouri, and Othman and Hammouri and Kinnaert, if there exists transformation
then the observer is designed as
where
Ciccarella, Dalla Mora, and Germani obtained more advanced and general results, removing the need for a nonlinear transform and proving global asymptotic convergence of the estimated state to the true state using only simple assumptions on regularity.
Sliding mode observer
As discussed for the linear case above, the peaking phenomenon present in Luenberger observers justifies the use of a sliding mode observer. The sliding mode observer uses non-linear high-gain feedback to drive estimated states to a hypersurface where there is no difference between the estimated output and the measured output. The non-linear gain used in the observer is typically implemented with a scaled switching function, like the signum (i.e., sgn) of the estimated – measured output error. Hence, due to this high-gain feedback, the vector field of the observer has a crease in it so that observer trajectories slide along a curve where the estimated output matches the measured output exactly. So, if the system is observable from its output, the observer states will all be driven to the actual system states. Additionally, by using the sign of the error to drive the sliding mode observer, the observer trajectories become insensitive to many forms of noise. Hence, some sliding mode observers have attractive properties similar to the Kalman filter but with simpler implementation.
As suggested by Drakunov, a sliding mode observer can also be designed for a class of non-linear systems. Such an observer can be written in terms of original variable estimate
where:
The idea can be briefly explained as follows. According to the theory of sliding modes, in order to describe the system behavior, once sliding mode starts, the function
The modified observation error can be written in the transformed states
and so
So:
- As long as
m 1 ( x ^ ) ≥ | h 2 ( x ( t ) ) | , the first row of the error dynamics,e ˙ 1 = h 2 ( x ^ ) − m 1 ( x ^ ) sgn ( e 1 ) , will meet sufficient conditions to enter thee 1 = 0 sliding mode in finite time. - Along the
e 1 = 0 surface, the correspondingv 2 ( t ) = { m 1 ( x ^ ) sgn ( e 1 ) } eq h 2 ( x ) , and sov 2 ( t ) − h 2 ( x ^ ) = h 2 ( x ) − h 2 ( x ^ ) = e 2 m 2 ( x ^ ) ≥ | h 3 ( x ( t ) ) | , the second row of the error dynamics,e ˙ 2 = h 3 ( x ^ ) − m 2 ( x ^ ) sgn ( e 2 ) , will enter thee 2 = 0 sliding mode in finite time. - Along the
e i = 0 surface, the correspondingv i + 1 ( t ) = { … } eq h i + 1 ( x ) . Hence, so long asm i + 1 ( x ^ ) ≥ | h i + 2 ( x ( t ) ) | , the( i + 1 ) th row of the error dynamics,e ˙ i + 1 = h i + 2 ( x ^ ) − m i + 1 ( x ^ ) sgn ( e i + 1 ) , will enter thee i + 1 = 0 sliding mode in finite time.
So, for sufficiently large
In the case of the sliding mode observer for the system with the input, additional conditions are needed for the observation error to be independent of the input. For example, that
does not depend on time. The observer is then
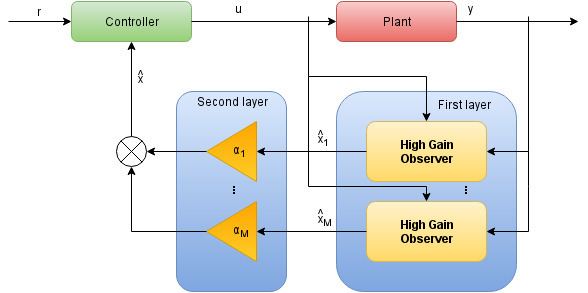
Multi Observer
Multi observer extends High Gain Observer structure from single to multi observer, with many models working simultaneously. This has two layers: the first consists of multiple High Gain Observers with different estimation states, and the second determines the importance weights of the first layer observers. The algorithm is simple to implement and does not contain any risky operations like differentiation. The idea of multiple models was previously applied to obtain information in adaptive control .
Assume that the number of High Gain Observers equals n+1
where
where
Let assume that
and
where
Some transformation yields to linear regression problem
This formula gives possibility to estimate
Calculate
where
where
Bounding observers
The Bounding or Interval observers constitute a class of observers that provide two estimations of the state simultaneously: one of the estimations provides an upper bound on the real value of the state, whereas the second one provides a lower bound. The real value of the state is then known to be always within these two estimations.
These bounds are very important in practical applications, as they make possible to know at each time the precision of the estimation.
Mathematically, two Luenberger observers can be used, if