
 | ||
Scattering parameters or S-parameters (the elements of a scattering matrix or S-matrix) describe the electrical behavior of linear electrical networks when undergoing various steady state stimuli by electrical signals.
Contents
- Background
- Definition
- Reciprocity
- Lossless networks
- Lossy networks
- Two Port S Parameters
- S Parameter properties of 2 port networks
- Complex linear gain
- Scalar linear gain
- Scalar logarithmic gain
- Insertion loss
- Input return loss
- Output return loss
- Reverse gain and reverse isolation
- Voltage reflection coefficient
- Voltage standing wave ratio
- 4 Port S Parameters
- 4 Port Mixed Mode S Parameters
- S parameters in amplifier design
- Port loading conditions for an amplifier to be unconditionally stable
- L displaystyle ho L values for i n 1 displaystyle left ho in ight1 output stability circle
- S displaystyle ho S values for o u t 1 displaystyle left ho out ight1 input stability circle
- Scattering transfer parameters
- 1 port S parameters
- Higher order S parameter matrices
- Vector network analyzer
- Calibration
- Minimization of systematic errors
- Output format of measured and corrected S parameter data
- List format
- Graphical Smith chart
- Graphical polar diagram
- Measuring S parameters of a one port network
- Measuring S parameters of networks with more than 2 ports
- References
The parameters are useful for several branches of electrical engineering, including electronics, communication systems design, and especially for microwave engineering.
The S-parameters are members of a family of similar parameters, other examples being: Y-parameters, Z-parameters, H-parameters, T-parameters or ABCD-parameters. They differ from these, in the sense that S-parameters do not use open or short circuit conditions to characterize a linear electrical network; instead, matched loads are used. These terminations are much easier to use at high signal frequencies than open-circuit and short-circuit terminations. Moreover, the quantities are measured in terms of power.
Many electrical properties of networks of components (inductors, capacitors, resistors) may be expressed using S-parameters, such as gain, return loss, voltage standing wave ratio (VSWR), reflection coefficient and amplifier stability. The term 'scattering' is more common to optical engineering than RF engineering, referring to the effect observed when a plane electromagnetic wave is incident on an obstruction or passes across dissimilar dielectric media. In the context of S-parameters, scattering refers to the way in which the traveling currents and voltages in a transmission line are affected when they meet a discontinuity caused by the insertion of a network into the transmission line. This is equivalent to the wave meeting an impedance differing from the line's characteristic impedance.
Although applicable at any frequency, S-parameters are mostly used for networks operating at radio frequency (RF) and microwave frequencies where signal power and energy considerations are more easily quantified than currents and voltages. S-parameters change with the measurement frequency, so frequency must be specified for any S-parameter measurements stated, in addition to the characteristic impedance or system impedance.
S-parameters are readily represented in matrix form and obey the rules of matrix algebra.
Background
The first published description of S-parameters was in the thesis of Vitold Belevitch in 1945. The name used by Belevitch was repartition matrix and limited consideration to lumped-element networks. The term scattering matrix was used by physicist and engineer Robert Henry Dicke in 1947 who independently developed the idea during wartime work on radar. The technique was popularized in the 1960s by Kaneyuki Kurokawa
In the S-parameter approach, an electrical network is regarded as a 'black box' containing various interconnected basic electrical circuit components or lumped elements such as resistors, capacitors, inductors and transistors, which interacts with other circuits through ports. The network is characterized by a square matrix of complex numbers called its S-parameter matrix, which can be used to calculate its response to signals applied to the ports.
For the S-parameter definition, it is understood that a network may contain any components provided that the entire network behaves linearly with incident small signals. It may also include many typical communication system components or 'blocks' such as amplifiers, attenuators, filters, couplers and equalizers provided they are also operating under linear and defined conditions.
An electrical network to be described by S-parameters may have any number of ports. Ports are the points at which electrical signals either enter or exit the network. Ports are usually pairs of terminals with the requirement that the current into one terminal is equal to the current leaving the other. S-parameters are used at frequencies where the ports are often coaxial or waveguide connections.
The S-parameter matrix describing an N-port network will be square of dimension N and will therefore contain
The following information must be defined when specifying a set of S-parameters:
- The frequency
- The nominal characteristic impedance (often 50 Ω)
- The allocation of port numbers
- Conditions which may affect the network, such as temperature, control voltage, and bias current, where applicable.
Definition
For a generic multi-port network, the ports are numbered from 1 to N, where N is the total number of ports. For port n, the associated S-parameter definition is in terms of incident and reflected 'power waves',
Kurokawa defines the incident power wave for each port as
and the reflected wave for each port is defined as
where
Sometimes it is useful to assume that the reference impedance is the same for all ports in which case the definitions of the incident and reflected waves may be simplified to
and
For all ports the reflected power waves may be defined in terms of the S-parameter matrix and the incident power waves by the following matrix equation:
where S is an N x N matrix the elements of which can be indexed using conventional matrix (mathematics) notation.
Reciprocity
A network will be reciprocal if it is passive and it contains only reciprocal materials that influence the transmitted signal. For example, attenuators, cables, splitters and combiners are all reciprocal networks and
An interesting property of 3-port networks, however, is that they cannot be simultaneously reciprocal, loss-free, and perfectly matched.
Lossless networks
A lossless network is one which does not dissipate any power, or:
Lossy networks
A lossy passive network is one in which the sum of the incident powers at all ports is greater than the sum of the reflected powers at all ports. It therefore dissipates power:
Two-Port S-Parameters
The S-parameter matrix for the 2-port network is probably the most commonly used and serves as the basic building block for generating the higher order matrices for larger networks. In this case the relationship between the reflected, incident power waves and the S-parameter matrix is given by:
Expanding the matrices into equations gives:
and
Each equation gives the relationship between the reflected and incident power waves at each of the network ports, 1 and 2, in terms of the network's individual S-parameters,
Similarly, if port 1 is terminated in the system impedance then
The 2-port S-parameters have the following generic descriptions:
If, instead of defining the voltage wave direction relative to each port, they are defined by their absolute direction as forward
S-Parameter properties of 2-port networks
An amplifier operating under linear (small signal) conditions is a good example of a non-reciprocal network and a matched attenuator is an example of a reciprocal network. In the following cases we will assume that the input and output connections are to ports 1 and 2 respectively which is the most common convention. The nominal system impedance, frequency and any other factors which may influence the device, such as temperature, must also be specified.
Complex linear gain
The complex linear gain G is given by
That is the linear ratio of the output reflected power wave divided by the input incident power wave, all values expressed as complex quantities. For lossy networks it is sub-unitary, for active networks
Scalar linear gain
The scalar linear gain (or linear gain magnitude) is given by
That is simply the scalar voltage gain as a linear ratio of the output voltage and the input voltage. As this is a scalar quantity, the phase is not relevant in this case.
Scalar logarithmic gain
The scalar logarithmic (decibel or dB) expression for gain (g) is
This is more commonly used than scalar linear gain and a positive quantity is normally understood as simply a 'gain'... A negative quantity can be expressed as a 'negative gain' or more usually as a 'loss' equivalent to its magnitude in dB. For example, a 10 m length of cable may have a gain of - 1 dB at 100 MHz or a loss of 1 dB at 100 MHz.
Insertion loss
In case the two measurement ports use the same reference impedance, the insertion loss (IL) is the magnitude of the transmission coefficient |S21| expressed in decibels. It is thus given by:
It is the extra loss produced by the introduction of the device under test (DUT) between the 2 reference planes of the measurement. Notice that the extra loss can be introduced by intrinsic loss in the DUT and/or mismatch. In case of extra loss the insertion loss is defined to be positive. The negative of insertion loss expressed in decibels is defined as insertion gain.
Input return loss
Input return loss (RLin) can be thought of as a measure of how close the actual input impedance of the network is to the nominal system impedance value. Input return loss expressed in decibels is given by
Note that for passive two-port networks in which |S11| ≤ 1, it follows that return loss is a non-negative quantity: RLin ≥ 0. Also note that somewhat confusingly, return loss is sometimes used as the negative of the quantity defined above, but this usage is, strictly speaking, incorrect based on the definition of loss.
Output return loss
The output return loss (RLout) has a similar definition to the input return loss but applies to the output port (port 2) instead of the input port. It is given by
Reverse gain and reverse isolation
The scalar logarithmic (decibel or dB) expression for reverse gain (
Often this will be expressed as reverse isolation (
Voltage reflection coefficient
The voltage reflection coefficient at the input port (
As
Voltage reflection coefficients are complex quantities and may be graphically represented on polar diagrams or Smith Charts
See also the Reflection Coefficient article.
Voltage standing wave ratio
The voltage standing wave ratio (VSWR) at a port, represented by the lower case 's', is a similar measure of port match to return loss but is a scalar linear quantity, the ratio of the standing wave maximum voltage to the standing wave minimum voltage. It therefore relates to the magnitude of the voltage reflection coefficient and hence to the magnitude of either
At the input port, the VSWR (
At the output port, the VSWR (
This is correct for reflection coefficients with a magnitude no greater than unity, which is usually the case. A reflection coefficient with a magnitude greater than unity, such as in a tunnel diode amplifier, will result in a negative value for this expression. VSWR, however, from its definition, is always positive. A more correct expression for port k of a multiport is;
4-Port S-Parameters
4 Port S Parameters are used to characterize 4 port networks. They include information regarding the reflected and incident power waves between the 4 ports of the network.
They are commonly used to analyze a pair of coupled transmission lines to determine the amount of cross-talk between them, if they are driven by two separate single ended signals, or the reflected and incident power of a differential signal driven across them. Many specifications of high speed differential signals define a communication channel in terms of the 4-Port S-Parameters, for example the 10-Gigabit Attachment Unit Interface (XAUI), SATA, PCI-X, and InfiniBand systems.
4-Port Mixed-Mode S-Parameters
4-Port mixed-Mode S-Parameters characterize a 4 port network in terms of the response of the network to common mode and differential stimulus signals. The following table displays the 4-Port Mixed-Mode S-Parameters.
Note the format of the parameter notation SXYab, where “S” stands for scattering parameter or S-parameter, “X” is the response mode (differential or common), “Y” is the stimulus mode (differential or common), “a” is the response (output) port and b is the stimulus (input) port. This is the typical nomenclature for scattering parameters.
The first quadrant is defined as the upper left 4 parameters describing the differential stimulus and differential response characteristics of the device under test. This is the actual mode of operation for most high-speed differential interconnects and is the quadrant that receives the most attention. It includes input differential return loss (SDD11), input differential insertion loss (SDD21), output differential return loss (SDD22) and output differential insertion loss (SDD12). Some benefits of differential signal processing are;
The second and third quadrants are the upper right and lower left 4 parameters, respectively. These are also referred to as the cross-mode quadrants. This is because they fully characterize any mode conversion occurring in the device under test, whether it is common-to-differential SDCab conversion (EMI susceptibility for an intended differential signal SDD transmission application) or differential-to-common SCDab conversion (EMI radiation for a differential application). Understanding mode conversion is very helpful when trying to optimize the design of interconnects for gigabit data throughput.
The fourth quadrant is the lower right 4 parameters and describes the performance characteristics of the common-mode signal SCCab propagating through the device under test. For a properly designed SDDab differential device there should be minimal common-mode output SCCab. However, the fourth quadrant common-mode response data is a measure of common-mode transmission response and used in a ratio with the differential transmission response to determine the network common-mode rejection. This common mode rejection is an important benefit of differential signal processing and can be reduced to one in some differential circuit implementations.
S-parameters in amplifier design
The reverse isolation parameter
Suppose the output port of a real (non-unilateral or bilateral) amplifier is connected to an arbitrary load with a reflection coefficient of
If the amplifier is unilateral then
A similar property exists in the opposite direction, in this case if
Port loading conditions for an amplifier to be unconditionally stable
An amplifier is unconditionally stable if a load or source of any reflection coefficient can be connected without causing instability. This condition occurs if the magnitudes of the reflection coefficients at the source, load and the amplifier's input and output ports are simultaneously less than unity. An important requirement that is often overlooked is that the amplifier be a linear network with no poles in the right half plane. Instability can cause severe distortion of the amplifier's gain frequency response or, in the extreme, oscillation. To be unconditionally stable at the frequency of interest, an amplifier must satisfy the following 4 equations simultaneously:
The boundary condition for when each of these values is equal to unity may be represented by a circle drawn on the polar diagram representing the (complex) reflection coefficient, one for the input port and the other for the output port. Often these will be scaled as Smith Charts. In each case coordinates of the circle centre and the associated radius are given by the following equations:
ρ L {displaystyle ho _{L},} values for | ρ i n | = 1 {displaystyle left| ho _{in} ight|=1,} (output stability circle)
Radius
Center
ρ S {displaystyle ho _{S},} values for | ρ o u t | = 1 {displaystyle left| ho _{out} ight|=1,} (input stability circle)
Radius
Center
where, in both cases
and the superscript star (*) indicates a complex conjugate.
The circles are in complex units of reflection coefficient so may be drawn on impedance or admittance based Smith Charts normalised to the system impedance. This serves to readily show the regions of normalised impedance (or admittance) for predicted unconditional stability. Another way of demonstrating unconditional stability is by means of the Rollett stability factor (
The condition of unconditional stability is achieved when
Scattering transfer parameters
The Scattering transfer parameters or T-parameters of a 2-port network are expressed by the T-parameter matrix and are closely related to the corresponding S-parameter matrix. The T-parameter matrix is related to the incident and reflected normalised waves at each of the ports as follows:
However, they could be defined differently, as follows :
The RF Toolbox add-on to MATLAB and several books (for example "Network scattering parameters") use this last definition, so caution is necessary. The "From S to T" and "From T to S" paragraphs in this article are based on the first definition. Adaptation to the second definition is trivial (interchanging T11 for T22, and T12 for T21). The advantage of T-parameters compared to S-parameters is that they may be used to readily determine the effect of cascading 2 or more 2-port networks by simply multiplying the associated individual T-parameter matrices. If the T-parameters of say three different 2-port networks 1, 2 and 3 are
As with S-parameters, T-parameters are complex values and there is a direct conversion between the two types. Although the cascaded T-parameters is a simple matrix multiplication of the individual T-parameters, the conversion for each network's S-parameters to the corresponding T-parameters and the conversion of the cascaded T-parameters back to the equivalent cascaded S-parameters, which are usually required, is not trivial. However once the operation is completed, the complex full wave interactions between all ports in both directions will be taken into account. The following equations will provide conversion between S and T parameters for 2-port networks.
From S to T:
From T to S
Where
1-port S-parameters
The S-parameter for a 1-port network is given by a simple 1 x 1 matrix of the form
Higher-order S-parameter matrices
Higher order S-parameters for pairs of dissimilar ports (
and
For example, a 3-port network such as a 2-way splitter would have the following S-parameter definitions
Vector network analyzer
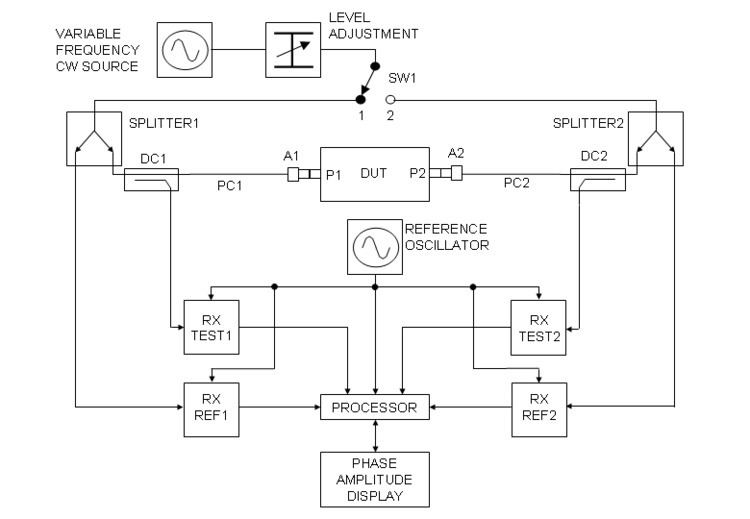
The diagram shows the essential parts of a typical 2-port vector network analyzer (VNA). The two ports of the device under test (DUT) are denoted port 1 (P1) and port 2 (P2). The test port connectors provided on the VNA itself are precision types which will normally have to be extended and connected to P1 and P2 using precision cables 1 and 2, PC1 and PC2 respectively and suitable connector adaptors A1 and A2 respectively.
The test frequency is generated by a variable frequency CW source and its power level is set using a variable attenuator. The position of switch SW1 sets the direction that the test signal passes through the DUT. Initially consider that SW1 is at position 1 so that the test signal is incident on the DUT at P1 which is appropriate for measuring
Calibration
Prior to a VNA S-parameter measurement, the first essential step is to perform an accurate calibration appropriate to the intended measurements. Several types of calibration are normally available on the VNA. It is only in the last few years that VNAs have had the sufficiently advanced processing capability, at realistic cost, required to accomplish the more advanced types of calibration, including corrections for systematic errors. The more basic types, often called 'response' calibrations, may be performed quickly but will only provide a result with moderate uncertainty. For improved uncertainty and dynamic range of the measurement a full 2 port calibration is required prior to DUT measurement. This will effectively eliminate all sources of systematic errors inherent in the VNA measurement system.
Minimization of systematic errors
Systematic errors are those which do not vary with time during a calibration. For a set of 2 port S-parameter measurements there are a total of 12 types of systematic errors which are measured and removed mathematically as part of the full 2 port calibration procedure. They are, for each port:
1. directivity and crosstalk
2. source and load mismatches
3. frequency response errors caused by reflection and transmission tracking within the test receivers
The calibration procedure requires initially setting up the VNA with all the cables, adaptors and connectors necessary to connect to the DUT but not at this stage connecting it. A calibration kit is used according to the connector types fitted to the DUT. This will normally include adaptors, nominal short circuits (SCs), open circuits (OCs) and load termination (TERM) standards of both connector sexes appropriate to the VNA and DUT connectors. Even with standards of high quality, when performing tests at the higher frequencies into the microwave range various stray capacitances and inductances will become apparent and cause uncertainty during the calibration. Data relating to the strays of the particular calibration kit used are measured at the factory traceable to national standards and the results are programmed into the VNA memory prior to performing the calibration.
The calibration procedure is normally software controlled, and instructs the operator to fit various calibration standards to the ends of the DUT connecting cables as well as making a through connection. At each step the VNA processor captures data across the test frequency range and stores it. At the end of the calibration procedure, the processor uses the stored data thus obtained to apply the systematic error corrections to all subsequent measurements made. All subsequent measurements are known as 'corrected measurements'. At this point the DUT is connected and a corrected measurement of its S-parameters made.
Output format of measured and corrected S-parameter data
The S-parameter test data may be provided in many alternative formats, for example: list, graphical (Smith chart or polar diagram).
List format
In list format the measured and corrected S-parameters are tabulated against frequency. The most common list format is known as Touchstone or SNP, where N is the number of ports. Commonly text files containing this information would have the filename extension '.s2p'. An example of a Touchstone file listing for the full 2-port S-parameter data obtained for a device is shown below:
! Created Fri Jul 21 14:28:50 2005# MHZ S DB R 50! SP1.SP50 -15.4 100.2 10.2 173.5 -30.1 9.6 -13.4 57.251 -15.8 103.2 10.7 177.4 -33.1 9.6 -12.4 63.452 -15.9 105.5 11.2 179.1 -35.7 9.6 -14.4 66.953 -16.4 107.0 10.5 183.1 -36.6 9.6 -14.7 70.354 -16.6 109.3 10.6 187.8 -38.1 9.6 -15.3 71.4Rows beginning with an exclamation mark contains only comments. The row beginning with the hash symbol indicates that in this case frequencies are in megahertz (MHZ), S-parameters are listed (S), magnitudes are in dB log magnitude (DB) and the system impedance is 50 Ohm (R 50). There are 9 columns of data. Column 1 is the test frequency in megahertz in this case. Columns 2, 4, 6 and 8 are the magnitudes of
Graphical (Smith chart)
Any 2-port S-parameter may be displayed on a Smith chart using polar co-ordinates, but the most meaningful would be
Graphical (polar diagram)
Any 2-port S-parameter may be displayed on a polar diagram using polar co-ordinates.
In either graphical format each S-parameter at a particular test frequency is displayed as a dot. If the measurement is a sweep across several frequencies a dot will appear for each. Many VNAs connect successive dots with straight lines for easier visibility.
Measuring S-parameters of a one-port network
The S-parameter matrix for a network with just one port will have just one element represented in the form
Measuring S-parameters of networks with more than 2 ports
VNAs designed for the simultaneous measurement of the S-parameters of networks with more than two ports are feasible but quickly become prohibitively complex and expensive. Usually their purchase is not justified since the required measurements can be obtained using a standard 2-port calibrated VNA with extra measurements followed by the correct interpretation of the results obtained. The required S-parameter matrix can be assembled from successive two port measurements in stages, two ports at a time, on each occasion with the unused ports being terminated in high quality loads equal to the system impedance. One risk of this approach is that the return loss or VSWR of the loads themselves must be suitably specified to be as close as possible to a perfect 50 Ohms, or whatever the nominal system impedance is. For a network with many ports there may be a temptation, on grounds of cost, to inadequately specify the VSWRs of the loads. Some analysis will be necessary to determine what the worst acceptable VSWR of the loads will be.
Assuming that the extra loads are specified adequately, if necessary, two or more of the S-parameter subscripts are modified from those relating to the VNA (1 and 2 in the case considered above) to those relating to the network under test (1 to N, if N is the total number of DUT ports). For example, if the DUT has 5 ports and a two port VNA is connected with VNA port 1 to DUT port 3 and VNA port 2 to DUT port 5, the measured VNA results (