
 | ||
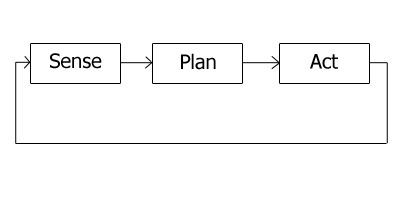
In robotics, a robotic paradigm is a mental model of how a robot operates. A robotic paradigm can be described by the relationship between the three primitives of robotics: Sense Plan Act. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made.
Contents
Hierarchical/deliberative paradigm
The reactive paradigm
Hybrid deliberate/reactive paradigm
References
Robotic paradigm Wikipedia(Text) CC BY-SA