
 | ||
The RoboCup Standard Platform League (SPL) is one of several leagues within RoboCup, an international competition with autonomous robotic soccer matches as the main event.
Contents
Overview
In the Standard Platform League all teams use identical (i.e., standard) robots, allowing the teams concentrate on software development rather than the mechanics of robots. The robots operate fully autonomously; i.e., there is no remote control by either humans or computers during the games.
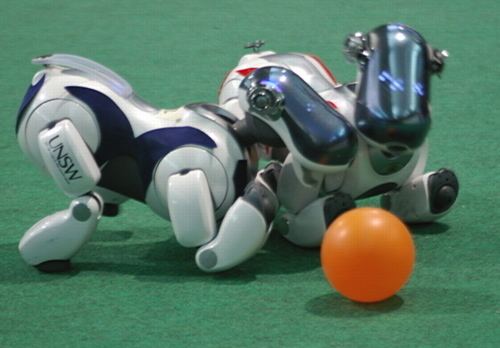
The League began as the Sony Four-Legged League in 1999 using the Sony AIBO. Initially a small number of teams were invited to join the league. In 2002, the league was opened and teams were allowed to apply through a qualification process. After Sony announced that it would discontinue production of the AIBO in 2006, the League searched for a new platform and decided on the Aldebaran Robotics humanoid NAO. In 2008, the League ran both AIBOs and Naos and was renamed the Standard Platform League. From 2009, only the Naos were used.
2014
A group photo of all teams participating in RoboCup SPL 2014
2013
A group photo of all teams participating in RoboCup SPL 2013
Robots on display for the Queen of The Netherlands at RoboCup 2013
2012
A group photo of all teams participating in RoboCup SPL 2012
2011
A group photo of all teams participating in RoboCup SPL 2011
2010
A group photo of all teams participating in RoboCup SPL 2010
2009
A group photo of all teams participating in RoboCup SPL 2009
Founders of the League
Rules
Robots
1999-2008 Sony AIBO.
2008–Present Aldebaran Robotics humanoid NAO robots.
Technologies
Control of the robots relies on several areas of robotics, including