
 | ||
In mathematics, a quadric or quadric surface (quadric hypersurface in higher dimension), is a generalization of conic sections (ellipses, parabolas, and hyperbolas). It is an hypersurface (of dimensions D) in a (D + 1)-dimensional space, and is defined as the zero set of an irreducible polynomial of degree two in D + 1 variables (D=1 in the case of conic sections). When the defining polynomial is not absolutely irreducible, the zero set is generally not considered as a quadric, although it is often called a degenerated quadric or a reducible quadric.
Contents
In coordinates x1, x2, ..., xD+1, the general quadric is thus defined by the algebraic equation
which may be compactly written in vector and matrix notation as:
where x = (x1, x2, ..., xD+1) is a row vector, xT is the transpose of x (a column vector), Q is a (D + 1) × (D + 1) matrix and P is a (D + 1)-dimensional row vector and R a scalar constant. The values Q, P and R are often taken to be over real numbers or complex numbers, but a quadric may be defined over any field.
A quadric is an affine algebraic variety, or, if it is reducible, an affine algebraic set. Quadrics may also be defined in projective spaces, see Quadric (projective geometry).
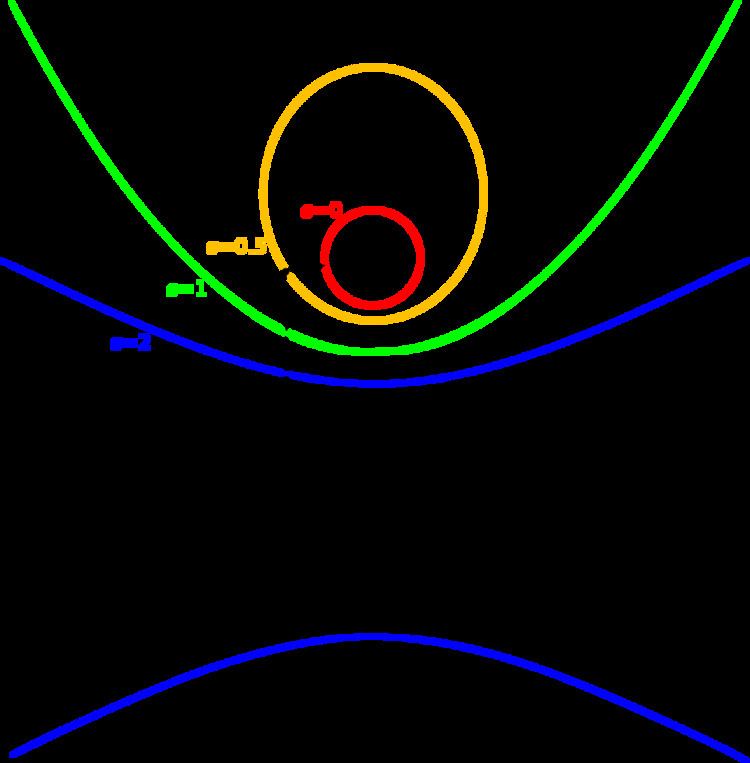
Euclidean plane
Quadrics in the Euclidean plane are those of dimension D = 1, which is to say that they are plane curves. In this case, one talks of conic sections, or conics.
Euclidean space
In three-dimensional Euclidean space, quadrics have dimension D = 2, and are known as quadric surfaces. They are classified and named by their orbits under affine transformations. More precisely, if an affine transformation maps a quadric onto another one, they belong to the same class, and share the same name and many properties.
The principal axis theorem show that for any quartic (possibly reducible), a suitable change of Cartesian coordinates allows putting the quadratic equation of the quadric into one of the following normal forms:
where the
Each of these 17 normal forms correspond to a single orbit under affine transformations. In three cases there are no real points:
It remains nine true quadrics, a cone and three cylinders (called degenerated quadrics by some authors) and five non-degenerated quadrics (ellipsoid, paraboloids and hyperboloids), which are detailed in the following table.
In a three-dimensional Euclidean space there are 17 such normal forms. Of these 16 forms, five are nondegenerate, and the remaining are degenerate forms. Degenerate forms include planes, lines, points or even no points at all.
Projective geometry
The quadrics can be treated in a uniform manner by introducing homogeneous coordinates on a Euclidean space, thus effectively regarding it as a projective space. Thus if the original (affine) coordinates on RD+1 are
one introduces new coordinates on RD+2
related to the original coordinates by
where the coefficients aij are symmetric in i and j. Regarding Q(X) = 0 as an equation in projective space exhibits the quadric as a projective algebraic variety. The quadric is said to be non-degenerate if the quadratic form is non-singular; equivalently, if the matrix (aij) is invertible.
In real projective space, by Sylvester's law of inertia, a non-singular quadratic form Q(X) may be put into the normal form
by means of a suitable projective transformation (normal forms for singular quadrics can have zeros as well as ±1 as coefficients). For surfaces in space (dimension D = 2) there are exactly three nondegenerate cases:
The first case is the empty set.
The second case generates the ellipsoid, the elliptic paraboloid or the hyperboloid of two sheets, depending on whether the chosen plane at infinity cuts the quadric in the empty set, in a point, or in a nondegenerate conic respectively. These all have positive Gaussian curvature.
The third case generates the hyperbolic paraboloid or the hyperboloid of one sheet, depending on whether the plane at infinity cuts it in two lines, or in a nondegenerate conic respectively. These are doubly ruled surfaces of negative Gaussian curvature.
The degenerate form
generates the elliptic cylinder, the parabolic cylinder, the hyperbolic cylinder, or the cone, depending on whether the plane at infinity cuts it in a point, a line, two lines, or a nondegenerate conic respectively. These are singly ruled surfaces of zero Gaussian curvature.
We see that projective transformations don't mix Gaussian curvatures of different sign. This is true for general surfaces.
In complex projective space all of the nondegenerate quadrics become indistinguishable from each other.