
 | ||
Predictive Control of Switching Power Converters. Predictive controllers rely on optimum control systems theory and aim to solve a cost functional minimization problem. Predictive controllers are relatively easy to numerically implement but electronic power converters are non-linear time varying dynamic systems, so a different approach to predictive must be taken.
Contents
Principles of non-linear predictive optimum control
The first step to design a predictive controller is to derive a detailed direct dynamic model (including non-linearities) of the switching power converter. This model must contain enough detail of the converter dynamics to allow, from initial conditions, a forecast in real time and with negligible error, of the future behavior of the converter.
Sliding mode control of switching power converters chooses a vector to reach sliding mode as fast as possible (high switching frequency).
It would be better to choose a vector to ensure zero error at the end of the sampling period Δt.
To find such a vector, a previous calculation can be made (prediction);
The converter has a finite number of vectors (states) and is usually non-linear: one way is to try all vectors to find the one that minimizes the control errors, prior to the application of that vector to the converter.
Direct dynamics model based predictive control (DDMBPC)
Receding Horizon Optimum Predictive Control
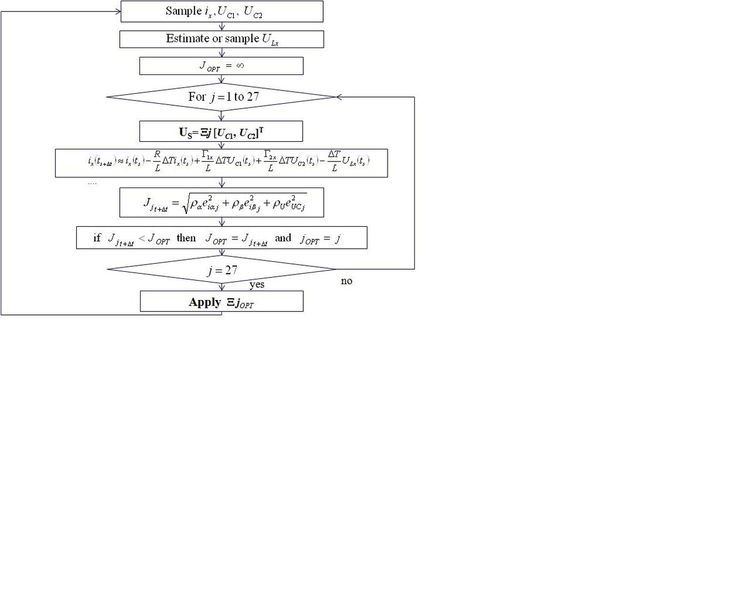
The algorithm
- Obtain a dynamic model of the converter. Example:
- Define a quadratic cost functional Jj (Δt, Usαβj) and its weights ρiα , ρiβ , ρuPWM
- Sample control variables and selected disturbances at sampling time ts
- Use a prediction equation, from the direct dynamics, to predict the value of the control variables in the next sampling time (ts+Δt) for all converter vectors Usαβj
- For each vector, calculate the cost function Jj(Δt, Usαβj) and determine its minimum:
- Apply the new vector, advance to the next sampling time (return to step 3).
Fast optimum predictive algorithm
- Obtain a dynamic model of the converter
- Sample control variables and selected disturbances at sampling interval Δt
- The control objective should be attained at sampling time t+Δt, then it+Δt = iref. Use the Euler-backward method to obtain:
- Use a prediction equation from the INVERSE DYNAMICS to predict the value of the OPTIMUM CONTROL VECTOR Usαβ t+Δt in the next sampling time (t+Δt)
- Calculate and minimize a cost function that evaluates the “distance” between the OPTIMUM VECTOR Usαβ t+Δt and all the available converter vectors Usαβj
- Apply the new vector, advance to the next sampling time (return to step 3).