
 | ||
Predictive control 1 introduction
Model predictive control (MPC) is an advanced method of process control that has been in use in the process industries in chemical plants and oil refineries since the 1980s. In recent years it has also been used in power system balancing models. Model predictive controllers rely on dynamic models of the process, most often linear empirical models obtained by system identification. The main advantage of MPC is the fact that it allows the current timeslot to be optimized, while keeping future timeslots in account. This is achieved by optimizing a finite time-horizon, but only implementing the current timeslot. MPC has the ability to anticipate future events and can take control actions accordingly. PID and LQR controllers do not have this predictive ability. MPC is nearly universally implemented as a digital control, although there is research into achieving faster response times with specially designed analog circuitry.
Contents
- Predictive control 1 introduction
- Introduction to model predictive control
- Overview
- Theory behind MPC
- Principles of MPC
- Nonlinear MPC
- Robust MPC
- Commercially available MPC software
- References
Introduction to model predictive control
Overview
The models used in MPC are generally intended to represent the behavior of complex dynamical systems. The additional complexity of the MPC control algorithm is not generally needed to provide adequate control of simple systems, which are often controlled well by generic PID controllers. Common dynamic characteristics that are difficult for PID controllers include large time delays and high-order dynamics.
MPC models predict the change in the dependent variables of the modeled system that will be caused by changes in the independent variables. In a chemical process, independent variables that can be adjusted by the controller are often either the setpoints of regulatory PID controllers (pressure, flow, temperature, etc.) or the final control element (valves, dampers, etc.). Independent variables that cannot be adjusted by the controller are used as disturbances. Dependent variables in these processes are other measurements that represent either control objectives or process constraints.
MPC uses the current plant measurements, the current dynamic state of the process, the MPC models, and the process variable targets and limits to calculate future changes in the dependent variables. These changes are calculated to hold the dependent variables close to target while honoring constraints on both independent and dependent variables. The MPC typically sends out only the first change in each independent variable to be implemented, and repeats the calculation when the next change is required.
While many real processes are not linear, they can often be considered to be approximately linear over a small operating range. Linear MPC approaches are used in the majority of applications with the feedback mechanism of the MPC compensating for prediction errors due to structural mismatch between the model and the process. In model predictive controllers that consist only of linear models, the superposition principle of linear algebra enables the effect of changes in multiple independent variables to be added together to predict the response of the dependent variables. This simplifies the control problem to a series of direct matrix algebra calculations that are fast and robust.
When linear models are not sufficiently accurate to represent the real process nonlinearities, several approaches can be used. In some cases, the process variables can be transformed before and/or after the linear MPC model to reduce the nonlinearity. The process can be controlled with nonlinear MPC that uses a nonlinear model directly in the control application. The nonlinear model may be in the form of an empirical data fit (e.g. artificial neural networks) or a high-fidelity dynamic model based on fundamental mass and energy balances. The nonlinear model may be linearized to derive a Kalman filter or specify a model for linear MPC.
An algorithmic study by El-Gherwi, Budman, and El Kamel shows that utilizing a dual-mode approach can provide significant reduction in online computations while maintaining comparative performance to a non-altered implementation. The proposed algorithm solves N convex optimization problems in parallel based on exchange of information among controllers.
Theory behind MPC
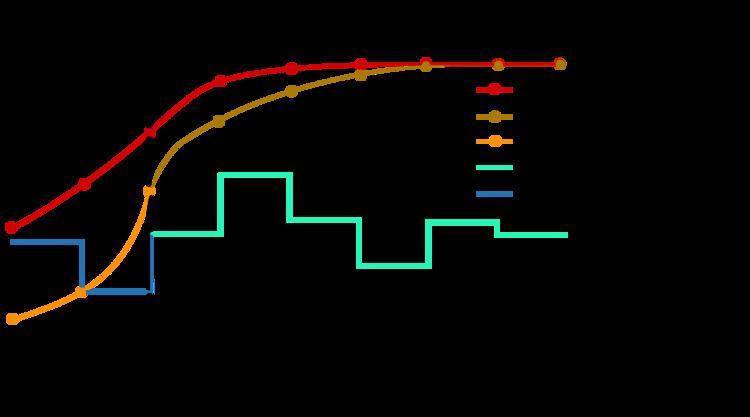
MPC is based on iterative, finite-horizon optimization of a plant model. At time
Principles of MPC
Model Predictive Control (MPC) is a multivariable control algorithm that uses:
to calculate the optimum control moves.
An example of a non-linear cost function for optimization is given by:
without violating constraints (low/high limits)
With:
etc.
Nonlinear MPC
Nonlinear Model Predictive Control, or NMPC, is a variant of model predictive control (MPC) that is characterized by the use of nonlinear system models in the prediction. As in linear MPC, NMPC requires the iterative solution of optimal control problems on a finite prediction horizon. While these problems are convex in linear MPC, in nonlinear MPC they are not convex anymore. This poses challenges for both NMPC stability theory and numerical solution.
The numerical solution of the NMPC optimal control problems is typically based on direct optimal control methods using Newton-type optimization schemes, in one of the variants: direct single shooting, direct multiple shooting methods, or direct collocation. NMPC algorithms typically exploit the fact that consecutive optimal control problems are similar to each other.
This allows to initialize the Newton-type solution procedure efficiently by a suitably shifted guess from the previously computed optimal solution, saving considerable amounts of computation time. The similarity of subsequent problems is even further exploited by path following algorithms (or "real-time iterations") that never attempt to iterate any optimization problem to convergence, but instead only take one iteration towards the solution of the most current NMPC problem, before proceeding to the next one, which is suitably initialized.
While NMPC applications have in the past been mostly used in the process and chemical industries with comparatively slow sampling rates, NMPC is more and more being applied to applications with high sampling rates, e.g., in the automotive industry, or even when the states are distributed in space (Distributed parameter systems). As an application in aerospace, recently, NMPC has been used to track optimal terrain-following/avoidance trajectories in real-time.
Robust MPC
Robust variants of Model Predictive Control (MPC) are able to account for set bounded disturbance while still ensuring state constraints are met. There are three main approaches to robust MPC:
Commercially available MPC software
Commercial MPC packages are available and typically contain tools for model identification and analysis, controller design and tuning, as well as controller performance evaluation.
A survey of commercially available packages has been provided by S.J. Qin and T.A. Badgwell in Control Engineering Practice 11 (2003) 733–764.