
 | ||
In iterative reconstruction in digital imaging, interior reconstruction (also known as limited field of view (LFV) reconstruction) is a technique to correct truncation artifacts caused by limiting image data to a small field of view. The reconstruction focuses on an area known as the region of interest (ROI). Although interior reconstruction can be applied to dental or cardiac CT images, the concept is not limited to CT. It is applied with one of several methods.
Contents
Methods
The purpose of each method is to solve for vector
Let
For CT image-reconstruction purposes,
To simplify the concept of interior reconstruction, the matrices
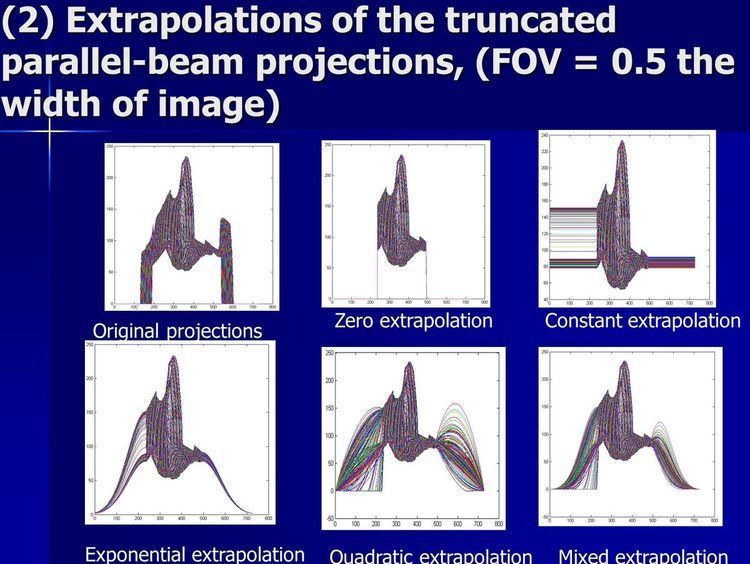
The first interior-reconstruction method listed below is extrapolation. It is a local tomography method which eliminates truncation artifacts but introduces another type of artifact: a bowl effect. An improvement is known as the adaptive extrapolation method, although the iterative extrapolation method below also improves reconstruction results. In some cases, the exact reconstruction can be found for the interior reconstruction. The local inverse method below modifies the local tomography method, and may improve the reconstruction result of the local tomography; the iterative reconstruction method can be applied to interior reconstruction. Among the above methods, extrapolation is often applied.
Extrapolation method
To simplify the concept of interior reconstruction, the matrices
The response in the outside region can be a guess
A solution of
at the boundary of the two regions. The extrapolation method is often combined with a priori knowledge, and an extrapolation method which reduces calculation time is shown below.
Adaptive extrapolation method
Assume a rough solution,
The reconstructed image can be calculated as follows:
It is assumed that
at the boundary of the interior region;
Iterative extrapolation method
It is assumed that a rough solution,
or
The reconstruction can be obtained as
Here
Local tomography
Local tomography, with a very short filter, is also known as lambda tomography.
Local inverse method
The local inverse method extends the concept of local tomography. The response in the outside region can be calculated as follows:
Consider the generalized inverse
Define
so that
Hence,
The above equation can be solved as
considering that
The solution can be simplified as
The matrix
Iterative reconstruction method
Here a goal function is defined, and this method iteratively achieves the goal. If the goal function can be some kind of normal, this is known as the minimal norm method.
subject to
and
where
Analytical solution
In special situations, the interior reconstruction can be obtained as an analytical solution; the solution of
Fast extrapolation
Extrapolated data often convolutes to a kernel function. After data is extrapolated its size is increased N times, where N = 2 ~ 3. If the data needs to be convoluted to a known kernel function, the numerical calculations will increase log(N)·N times, even with the fast Fourier transform (FFT). An algorithm exists, analytically calculating the contribution from part of the extrapolated data. The calculation time can be omitted, compared to the original convolution calculation; with this algorithm, the calculation of a convolution using the extrapolated data is not noticeably increased. This is known as fast extrapolation.
Comparison of methods
The extrapolation method is suitable in a situation where
i.e. a small truncation artifacts situation.The adaptive extrapolation method is suitable for a situation where
i.e. a normal truncation artifacts situation. This method also offers a rough solution for the exterior region.The iterative extrapolation method is suitable for a situation in which
i.e. a normal truncation artifacts situation. Although this method gets better interior reconstruction compared to adaptive reconstruction, it misses the result in the exterior region.Local tomography is suitable for a situation in which
i.e. a largest truncation artifacts situation. Although there are no truncation artifacts in this method, there is a fixed error (independent of the value ofThe local inverse method, identical to local tomography, suitable in a situation in which
i.e. a largest truncation artifacts situation. Although there are no truncation artifacts for this method, there is a fixed error (independent of the value ofThe iterative reconstruction method obtains a good result with large calculations. Although the analytic method achieves an exact result, it is only functional in some situations. The fast extrapolation method can get the same results as the other extrapolation methods, and can be applied to the above interior reconstruction methods to reduce the calculation.