
 | ||
In classical mechanics, holonomic constraints are relations between the position variables (and possibly time) which can be expressed in the following form:
Contents
- Holonomic system physics
- Transformation to independent generalized coordinates
- Differential form
- Classification of physical systems
- Examples
- References
Velocity-dependent constraints such as
Holonomic system (physics)
In classical mechanics a system may be defined as holonomic if all constraints of the system are holonomic. For a constraint to be holonomic it must be expressible as a function:
i.e. a holonomic constraint depends only on the coordinates
Transformation to independent generalized coordinates
The holonomic constraint equations can help us easily remove some of the dependent variables in our system. For example, if we want to remove
and replace the
Suppose that a physical system has
Differential form
Consider the following differential form of a constraint equation:
where cij, ci are the coefficients of the differentials dqj and dt for the ith constraint.
If the differential form is integrable, i.e., if there is a function
then this constraint is a holonomic constraint; otherwise, nonholonomic. Therefore, all holonomic and some nonholonomic constraints can be expressed using the differential form. Not all nonholonomic constraints can be expressed this way. Examples of nonholonomic constraints which can not be expressed this way are those that are dependent on generalized velocities. With a constraint equation in differential form, whether the constraint is holonomic or nonholonomic depends on the integrability of the differential form.
Classification of physical systems
In order to study classical physics rigorously and methodically, we need to classify systems. Based on previous discussion, we can classify physical systems into holonomic systems and non-holonomic systems. One of the conditions for the applicability of many theorems and equations is that the system must be a holonomic system. For example, if a physical system is a holonomic system and a monogenic system, then Hamilton's principle is the necessary and sufficient condition for the correctness of Lagrange's equation.
Examples
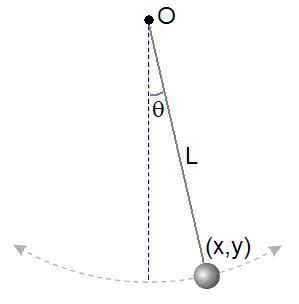
As shown at right, a simple pendulum is a system composed of a weight and a string. The string is attached at the top end to a pivot and at the bottom end to a weight. Being inextensible, the string’s length is a constant. Therefore, this system is holonomic; it obeys the holonomic constraint
where
The particles of a rigid body obey the holonomic constraint
where