
 | ||
The Wiener filter as originally proposed by Norbert Wiener is a signal processing filter which uses knowledge of the statistical properties of both the signal and the noise to reconstruct an optimal estimate of the signal from a noisy one-dimensional time-ordered data stream. The generalized Wiener filter generalizes the same idea beyond the domain of one-dimensional time-ordered signal processing, with two-dimensional image processing being the most common application.
Contents
Description
Consider a data vector
The generalized Wiener filter approaches 1 for signal-dominated parts of the data, and S/N for noise-dominated parts.
An often-seen variant expresses the filter in terms of inverse covariances. This is mathematically equivalent, but avoids excessive loss of numerical precision in the presence of high-variance modes. In this formulation, the generalized Wiener filter becomes
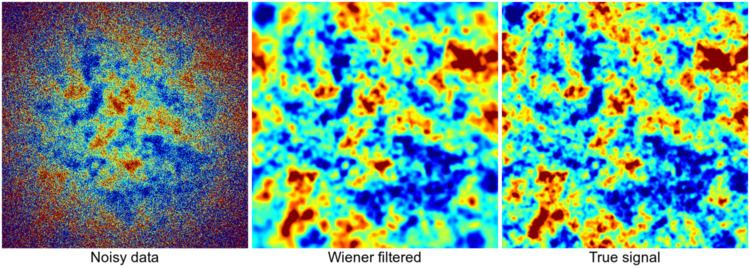
An example
The cosmic microwave background (CMB) is a homogeneous and isotropic random field, and its covariance is therefore diagonal in a spherical harmonics basis. Any given observation of the CMB will be noisy, with the noise typically having different statistical properties than the CMB. It could for example be uncorrelated in pixel space. The generalized Wiener filter exploits this difference in behavior to isolate as much as possible of the signal from the noise.
The Wiener-filtered estimate of the signal (the CMB in this case)