
 | ||
The Dolinar Receiver is a device based upon the Kennedy receiver that may be used to discriminate between two or more low-amplitude coherent states of light using displacements and adaptive measurements. The ability to discriminate signals encoded in coherent light has applications in communications where losses are unavoidable, such as transmission along fiber optics cable, through the atmosphere, or across deep space.
Contents
Digital Communication with Phase Modulation of Coherent States
In a similar way that digital information can be transmitted by modulating the frequency or amplitude of electromagnetic waves, digital information can be encoded within the phase of coherent light.
Consider two coherent states,
Binary digital communication can be achieved by sending, for instance, state
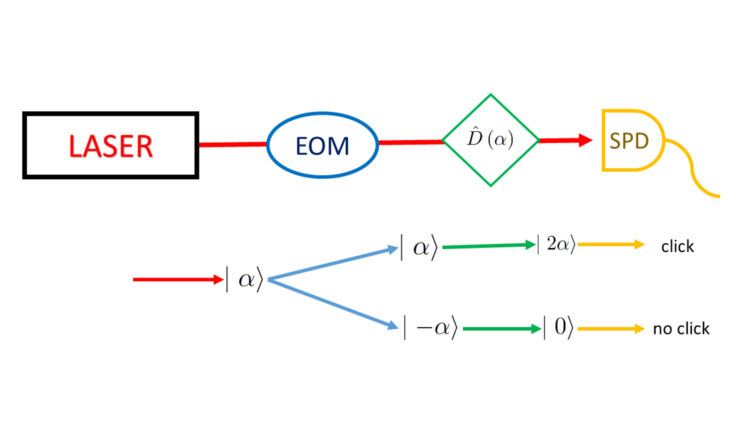
A simple example of a device that could transmit the binary coherent states is a switchable laser and an electo-optic modulator (EOM) that applies either a 0 or
Non-Orthogonality of Coherent States
In ideal digital communication, there is no ambiguity between when a 0 is sent and when a 1 is sent. However, if information is being transmitted via phase encoding in optical coherent states, there is no way to perfectly distinguish between any two coherent states,. This is because coherent states are not orthogonal to each other. For any two coherent states
In the case of binary coherent state communication, where we have the two states
The minimum probability of error to distinguish between binary coherent states becomes,
As the average number of photons
Kennedy Receiver
The Kennedy receiver is a device that can distinguish between binary coherent states. It operates on a basic level by first displacing the incoming state by
where
where
However, it is not guaranteed that a final state of
Therefore, if the SPD detects no photons, it is not certain which state was sent. The error of guessing wrong is equal to the probability
By displacing the incoming states, counting photons, and thinking about what was the most likely input state given the detection results, the error in discriminating between the binary coherent states can be improved.
Principles of Operation
The Dolinar receiver expands upon the Kennedy receiver to decrease the probability of error at the cost of higher complexity. In order to operate, the Donlinar receiver needs to be sent multiple copies of the input state, or the coherent input state is split up into multiple lower-amplitude states with different detector arrival times. This can be achieved by using a series of low-reflectance beam splitters, for instance.
The Dolinar receiver also makes use of an adaptive displacement mechanism, one that can quickly change from either
The unique feature of the Dolinar receiver is the feedback from the detector and the displacement mechanism in between arrivals of the input state copies. Counting either zero photons or one or more photons with the SPD does not give complete information about the input state. Rather, whether or not a photon was counted gives some information about the state, and a hypothesis can be proposed based on the information from the SPD. With the Kennedy receiver, the displacement is fixed at either
The feedback of the Donlinar receiver works by switching the displacement if there was a photon counted but the before the next copy of the input state arrives. If no photons are detected, the displacement remains unchanged for the next arrival of a copy. For each no count result, it becomes more and more likely that the state copies are being displaced to vacuum and the certainty of the hypothesis increases. On the whole, the history of the detection results in conjunction with their corresponding displacements can give more and more complete information about the most likely identity of the input state.
As an example, suppose before the first copy of the input state arrives, the receiver is set to test for
Another example can illustrate the potential error correction the feedback provides. Suppose the same setup as before, except that on the first detection trial no photons are detected, as is possible for the displaced
The probability of
Thus, the more copies of the input state being tested reduces the chance of misidentifying the input state. While more complex than the Kennedy receiver and requiring multiple copies of the input state, the Dolinar receiver's adaptive feedback offers a mechanism to reduce the chances of a hypothesis being wrong. Further, the Dolinar receiver shows more robustness against dark counts, a real-life phenomenon where SPDs can count a photon even if there is nothing, i.e. vacuum, to detect. If the detector counts a photon even when the hypothesis is correct and the input state copy was displaced to vacuum, the displacement will switch and there is a likely chance another photon will be detected on the next pass, switching the displacement back, where there will be a less likely chance to detect photons for future detection. As long as the rate of dark counts is not too high, the overall history of detection results can give a likely picture as to the nature of the original input state.
Experimental Example
An experiment using principles from the Dolinar receiver has recently been performed. In this experiment, there are four possible input states instead of two,
In this experiment, multiple copies of the input state are not sent to the receiver. In order to make multiple adaptive measurements, the input state is divided into ten copies, and each copy is displaced and measured in series. If no photons are detected after displacing a copy, the next displacement remains the same and another reading is taken with a detector. If a photon is detected, the next displacement may change to test a different hypothesis. However, a new hypothesis is not chosen at random. Rather, after a displacement and detection result, a deliberate decision is made on the new hypothesis given the total history of displacements and detection results using Bayesian inference. This ensures that each of the ten guesses are made as best as possible.
This awareness of the history of detection results provides robustness against dark counts inherent in the feedback technique of the Dolinar receiver. If after three displacements no photons are detected but on the fourth a photon is counted, the results of Bayesian interference may suggest that the hypothesis is still correct and the displacement may not change. If after a few more detection results no more photons are counted, it may be strongly inferred that the earlier photon count was the result of noise and that the hypothesis is still most likely correct.