
 | ||
In mathematics, with application in computational geometry, conformal geometric algebra (CGA) is the geometric algebra constructed over the resultant space of a projective map from an n-dimensional pseudo-Euclidean (including Euclidean) base space Ep,q into ℝp+1,q+1. This allows operations on the n-dimensional space, including rotations, translations and reflections to be represented using versors of the geometric algebra; and it is found that points, lines, planes, circles and spheres gain particularly natural and computationally amenable representations.
Contents
- Notation and terminology
- Base and representation spaces
- Mapping between the base space and the representation space
- Inverse mapping
- Origin and point at infinity
- As the solution of a pair of equations
- As derived from points of the object
- odds
- gx A 0
- Transformations
- References
The effect of the mapping is that generalized (i.e. including zero curvature) k-spheres in the base space map onto (k + 2)-blades, and so that the effect of a translation (or any conformal mapping) of the base space corresponds to a rotation in the higher-dimensional space. In the algebra of this space, based on the geometric product of vectors, such transformations correspond to the algebra's characteristic sandwich operations, similar to the use of quaternions for spatial rotation in 3D, which combine very efficiently. A consequence of rotors representing transformations is that the representations of spheres, planes, circles and other geometrical objects, and equations connecting them, all transform covariantly. A geometric object (a k-sphere) can be synthesized as the wedge product of k + 2 linearly independent vectors representing points on the object; conversely, the object can be decomposed as the repeated wedge product of vectors representing k + 2 distinct points in its surface. Some intersection operations also acquire a tidy algebraic form: for example, for the Euclidean base space E3, applying the wedge product to the dual of the tetravectors representing two spheres produces the dual of the trivector representation of their circle of intersection.
As this algebraic structure lends itself directly to effective computation, it facilitates exploration of the classical methods of projective geometry and inversive geometry in a concrete, easy-to-manipulate setting. It has also been used as an efficient structure to represent and facilitate calculations in screw theory. CGA has particularly been applied in connection with the projective mapping of the everyday Euclidean space E3 into a five-dimensional vector space ℝ4,1, which has been investigated for applications in robotics and computer vision. It can be applied generally to any pseudo-Euclidean space, and the mapping of Minkowski space E3,1 to the space ℝ4,2 is being investigated for applications to relativistic physics.
Notation and terminology
The Euclidean space containing the objects being modelled is referred to here as the base space, and the algebraic space used to projectively model these objects is referred to here as the representation space. A homogeneous subspace refers to a linear subspace of the algebraic space.
The terms for objects: point, line, circle, sphere, quasi-sphere etc. are used to mean either the geometric object in the base space, or the homogeneous subspace of the representation space that represents that object, with the latter generally being intended unless indicated otherwise. Algebraically, any nonzero null element of the homogeneous subspace will be used, with one element being referred to as normalized by some criterion.
Boldface lowercase Latin letters are used to represent position vectors from the origin to a point in the base space. Italic symbols are used for other elements of the representation space.
Base and representation spaces
The base space Ep,q is represented by extending a basis for the displacements from a chosen origin and adding two basis vectors e− and e+ orthogonal to the base space and to each other, with e−2 = −1 and e+2 = +1, creating the representation space ℝp+1,q+1.
It is convenient to use two null vectors no and n∞ as basis vectors in place of e+ and e−, where no = (e− − e+)/2, and n∞ = e− + e+. It can be verified, where x is in the base space, that:
These properties lead to the following formulas for the basis vector coefficients of a general vector r in the representation space for a basis with elements ei orthogonal to every other basis element:
The coefficient of no for r is −n∞ ⋅ rThe coefficient of n∞ for r is −no ⋅ rThe coefficient of ei for r is ei−1 ⋅ r.Mapping between the base space and the representation space
The mapping from a vector in the base space (being from the origin to a point in the affine space represented) is given by the formula:
Points and other objects that differ only by a nonzero scalar factor all map to the same object in the base space. When normalisation is desired, as for generating a simple reverse map of a point from the representation space to the base space or determining distances, the condition F(x) ⋅ n∞ = −1 may be used.
The forward mapping is equivalent to:
Inverse mapping
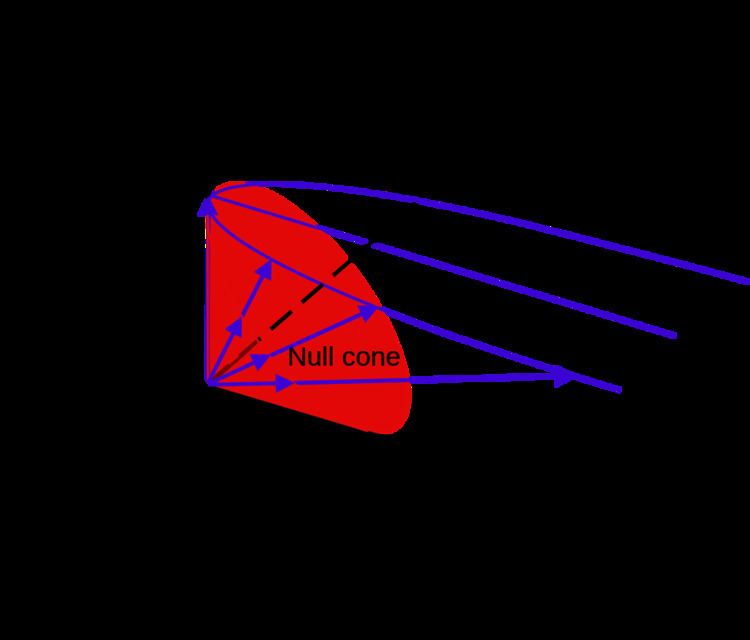
An inverse mapping for X on the null cone is given (Perwass eqn 4.37) by
This first gives a stereographic projection from the light-cone onto the plane r ⋅ n∞ = −1, and then throws away the no and n∞ parts, so that the overall result is to map all of the equivalent points αX = α(no + x + 1/2x2n∞) to x.
Origin and point at infinity
The point x = 0 in ℝp,q maps to no in ℝp+1,q+1, so no is identified as the (representation) vector of the point at the origin.
A vector in ℝp+1,q+1 with a nonzero n∞ coefficient, but a zero no coefficient, must (considering the inverse map) be the image of an infinite vector in ℝp,q. The direction n∞ therefore represents the (conformal) point at infinity. This motivates the subscripts o and ∞ for identifying the null basis vectors.
The choice of the origin is arbitrary: any other point may be chosen, as the representation is of an affine space. The origin merely represents a reference point, and is algebraically equivalent to any other point. Changing the origin corresponds to a rotation in the representation space.
As the solution of a pair of equations
Given any nonzero blade A of the representing space, the set of vectors that are solutions to a pair of homogeneous equations of the form
is the union of homogeneous 1-d subspaces of null vectors, and is thus a representation of a set of points in the base space. This leads to the choice of a blade A as being a useful way to represent a particular class of geometric object. Specific cases for the blade A (independent of the number of dimensions of the space) when the base space is Euclidean space are:
These each may split into three cases according to whether A2 is positive, zero or negative, corresponding (in reversed order in some cases) to the object as listed, a degenerate case of a single point, or no points (where the nonzero solutions of X ∧ A exclude null vectors).
The listed geometric objects (generalized n-spheres) become quasi-spheres in the more general case of the base space being pseudo-Euclidean.
Flat objects may be identified by the point at infinity being included in the solutions. Thus, if n∞ ∧ A = 0, the object will be a line, plane, etc., for the blade A respectively being of grade 3, 4, etc.
As derived from points of the object
A blade A representing of one of this class of object may be found as the outer product of linearly independent vectors representing points on the object. In the base space, this linear independence manifests as each point lying outside the object defined by the other points. So, for example, a fourth point lying on the generalized circle defined by three distinct points cannot be used as a fourth point to define a sphere.
odds
Points in e123 map onto the null cone—the null parabola if we set r . n∞ = -1.We can consider the locus of points in e123 s.t. in conformal space g(x) . A = 0, for various types of geometrical object A.We start by observing thatcompare:
the inner product and outer product representations are related by dualisation
x∧A = 0 <=> x . A* = 0 (check—works if x is 1-dim, A is n-1 dim)g(x) . A = 0
Transformations
This reflection operation can be used to build up general translations and rotations: