
Elevation -10,971 m | ||
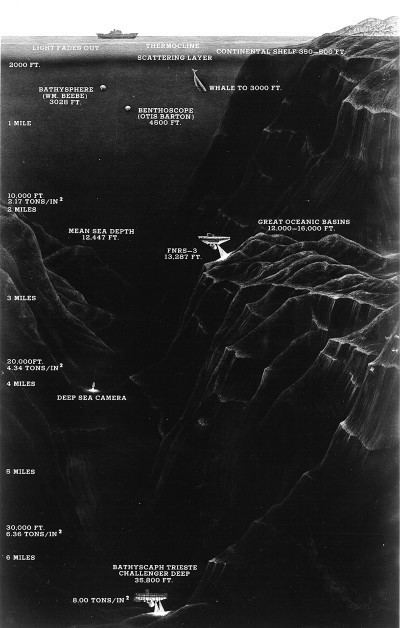 | ||
The Challenger Deep is the deepest known point in the Earth's seabed hydrosphere, with a depth of 10,898 to 10,916 m (35,755 to 35,814 ft) by direct measurement from submersibles, and slightly more by sonar bathymetry. It is in the Pacific Ocean, at the southern end of the Mariana Trench near the Mariana Islands group. The Challenger Deep is a relatively small slot-shaped depression in the bottom of a considerably larger crescent-shaped oceanic trench, which itself is an unusually deep feature in the ocean floor. Its bottom is about 11 km (7 mi) long and 1.6 km (1 mi) wide, with gently sloping sides. The closest land to the Challenger Deep is Fais Island (one of the outer islands of Yap), 287 km (178 mi) southwest, and Guam, 304 km (189 mi) to the northeast. It is located in the ocean territory of the Federated States of Micronesia, 1.6 km (1 mi) from its border with ocean territory associated with Guam.
Contents
- Map of Challenger Deep
- History of depth mapping from the surface
- Trieste
- Deepsea Challenger
- Planned manned descents
- Kaik
- ABISMO
- Nereus
- Haidou 1
- Lifeforms
- References
Map of Challenger Deep
The depression is named after the British Royal Navy survey ship HMS Challenger, whose expedition of 1872–1876 made the first recordings of its depth. According to the August 2011 version of the GEBCO Gazetteer of Undersea Feature Names, the location and depth of the Challenger Deep are 11°22.4′N 142°35.5′E and 10,920 m (35,827 ft) ±10 m (33 ft).
June 2009 sonar mapping of the Challenger Deep by the Simrad EM120 (sonar multibeam bathymetry system for 300–11,000 m deep water mapping) aboard the RV Kilo Moana indicated a depth of 10,971 metres (35,994 ft). The sonar system uses phase and amplitude bottom detection, with a precision of 0.2% to 0.5% of water depth; this is an error of about 22 to 55 m (72 to 180 ft) at this depth. Further soundings made by the US Center for Coastal & Ocean Mapping in October 2010 are in agreement with this figure, preliminarily placing the deepest part of the Challenger Deep at 10,994 m (36,070 ft), with an estimated vertical uncertainty of ±40 m (131 ft). A 2014 study concludes that with the best of 2010 multibeam echosounder technologies a depth uncertainty of ±25 m (82 ft) (95% confidence level) on 9 degrees of freedom and a positional uncertainty of ±20 to 25 m (66 to 82 ft) (2drms) remain and the location of the deepest depth recorded in the 2010 mapping is 10,984 m (36,037 ft) at 11.329903°N 142.199305°E / 11.329903; 142.199305 (11°19′47.650″N 142°11′57.498″E).
Only four descents have ever been achieved. The first descent by any vehicle was by the manned bathyscaphe Trieste in 1960. This was followed by the unmanned ROVs Kaikō in 1995 and Nereus in 2009. In March 2012 a manned solo descent was made by the deep-submergence vehicle Deepsea Challenger. These expeditions measured very similar depths of 10,898 to 10,916 metres (35,755 to 35,814 ft).
History of depth mapping from the surface
Over many years, the search for the point of maximum depth has involved many different vessels.
In 2014, a study was conducted regarding the determination of the depth and location of the Challenger Deep based on data collected previous to and during the 2010 sonar mapping of the Mariana Trench with a Kongsberg Maritime EM 122 multibeam echosounder system aboard the USNS Sumner (T-AGS-61). This study by James. V. Gardner et al. of the Center for Coastal & Ocean Mapping-Joint Hydrographic Center (CCOM/JHC), Chase Ocean Engineering Laboratory of the University of New Hampshire splits the measurement attempt history into three main groups: early single-beam echo sounders (1950s - 1970's), early multibeam echo sounders (1980s - 21st century), and modern (i.e., post-GPS, high-resolution) multibeam echo sounders. Taking uncertainties in depth measurements and position estimation into account the raw data of the 2010 bathymetry of the Challenger Deep vicinity consisting of 2,051,371 soundings from eight survey lines was analyzed. The study concludes that with the best of 2010 multibeam echosounder technologies after the analysis a depth uncertainty of ±25 m (82 ft) (95% confidence level) on 9 degrees of freedom and a positional uncertainty of ±20 to 25 m (66 to 82 ft) (2drms) remain and the location of the deepest depth recorded in the 2010 mapping is 10,984 m (36,037 ft) at 11.329903°N 142.199305°E / 11.329903; 142.199305. The depth measurement uncertainty is a composite of measured uncertainties in the spatial variations in sound-speed through the water volume, the ray-tracing and bottom-detection algorithms of the multibeam system, the accuracies and calibration of the motion sensor and navigation systems, estimates of spherical spreading, attenuation throughout the water volume, and so forth.
The 2009 and 2010 maximal depths were not confirmed by the series of dives Nereus made to the bottom during an expedition in May–June 2009. The direct descent measurements by the four expeditions which have reported from the bottom, have fixed depths in a narrow range from 10,916 m (Trieste) to 10,911 m (Kaikō), to 10,902 m (Nereus) to 10,898 m (Deepsea Challenger) Although an attempt was made to correlate locations, it could not be absolutely certain that Nereus (or the other descents) reached exactly the same points found to be maximally deep by the sonar/echo sounders of previous mapping expeditions, even though one of these echo soundings was made by Nereus mothership.
Trieste
On 23 January 1960, the Swiss-designed Trieste, originally built in Italy and acquired by the U.S. Navy, descended to the ocean floor in the trench manned by Jacques Piccard (who co-designed the submersible along with his father, Auguste Piccard) and USN Lieutenant Don Walsh. Their crew compartment was inside a spherical pressure vessel, which was a heavy-duty replacement (of the Italian original) built by Krupp Steel Works of Essen, Germany. Their descent took almost five hours and the two men spent barely twenty minutes on the ocean floor before undertaking the three-hour-and-fifteen-minute ascent. Their early departure from the ocean floor was due to their concern over a crack in the outer window caused by the temperature differences during their descent. The measured depth at the bottom was measured with a manometer at 10,916 m (35,814 ft) ±5 m (16 ft).
Deepsea Challenger
On 26 March 2012 (local time), Canadian film director James Cameron made a solo manned descent in the DSV Deepsea Challenger to the bottom of the Challenger Deep. At approximately 05:15 ChST on 26 March (19:15 UTC on 25 March), the descent began. At 07:52 ChST (21:52 UTC), Deepsea Challenger arrived at the bottom. The descent lasted 2 hours and 36 minutes and the recorded depth was 10,898.4 metres (35,756 ft) when Deepsea Challenger touched down. Cameron had planned to spend about six hours near the ocean floor exploring but decided to start the ascent to the surface after only 2 hours and 34 minutes. The time on the bottom was shortened because a hydraulic fluid leak in the lines controlling the manipulator arm obscured the visibility out the only viewing port. It also caused the loss of the submersible's starboard thrusters. At around 12:00 ChST (02:00 UTC on 26 March), the Deepsea Challenge website says the sub resurfaced after a 90-minute ascent, although Paul Allen's tweets indicate the ascent took only about 67 minutes. During a post-dive press conference Cameron said: "I landed on a very soft, almost gelatinous flat plain. Once I got my bearings, I drove across it for quite a distance ... and finally worked my way up the slope." The whole time, Cameron said, he didn't see any fish, or any living creatures more than an inch (2.5 cm) long: "The only free swimmers I saw were small amphipods"—shrimplike bottom-feeders.
Planned manned descents
Several other manned expeditions are planned. These include:
Kaikō
On 24 March 1995, the Japanese robotic deep-sea probe Kaikō broke the depth record for unmanned probes when it reached close to the surveyed bottom of the Challenger Deep. Created by the Japan Agency for Marine-Earth Science and Technology (JAMSTEC), it was one of the few unmanned deep-sea probes in operation that could dive deeper than 6,000 metres (20,000 ft). The manometer measured depth of 10,911 m (35,797 ft) ±3 m (10 ft) at 11°22.39′N 142°35.54′E for the Challenger Deep is believed to be the most accurate measurement taken yet. Kaikō also collected sediment cores containing marine organisms from the bottom of the deep. Kaikō made many unmanned descents to the Mariana Trench during three expeditions in 1995, 1996 and 1998. The greatest depth measured by Kaikō in 1996 was 10,898 m (35,755 ft) at 11°22.10′N 142°25.85′E and in 1998 10,907 m (35,784 ft) at 11°22.95′N 142°12.42′E. It was lost at sea off Shikoku Island during Typhoon Chan-Hom on 29 May 2003.
ABISMO
On 3 June 2008, the Japanese robotic deep-sea probe ABISMO (Automatic Bottom Inspection and Sampling Mobile) reached the bottom of the Mariana Trench about 150 km (93 mi) east of the Challenger Deep and collected core samples of the deep sea sediment and water samples of the water column. Created by the Japan Agency for Marine-Earth Science and Technology (JAMSTEC), it was the only unmanned deep-sea probe in use that could dive deeper than 10,000 m (32,808 ft) after that of Nereus. During ABISMO's deepest Mariana Trench dive its manometer measured a depth of 10,258 m (33,655 ft) ±3 m (10 ft)
Nereus
On 31 May 2009 the United States sent the Nereus hybrid remotely operated vehicle (HROV) to the Challenger Deep. Nereus thus became the first vehicle to reach the Mariana Trench since 1998 and the deepest-diving vehicle then in operation. Project manager and developer Andy Bowen heralded the achievement as "the start of a new era in ocean exploration". Nereus, unlike Kaikō, did not need to be powered or controlled by a cable connected to a ship on the ocean surface.
Nereus spent over 10 hours at the bottom of the Challenger Deep and measured a depth of 10,902 m (35,768 ft) at 11°22.1′N 142°35.4′E, while sending live video and data back to its mothership RV Kilo Moana at the surface and collecting geological and biological samples from the Challenger Deep bottom with its manipulator arm for further scientific analysis.
The Nereus was operated by the Woods Hole Oceanographic Institution. It was lost on May 10, 2014.
Haidou-1
On 23 May 2016 the Chinese submersible Haidou-1 dove to a depth of 10,767 m (35,325 ft) in the Mariana Trench. This autonomous and remotely operated vehicle has a design depth of 11,000 m (36,089 ft).
Lifeforms
The Summary Report of the HMS Challenger expedition lists radiolaria from the two dredged samples taken when the Challenger Deep was first discovered. These (Nassellaria and Spumellaria) were reported in the Report on Radiolaria (1887) written by Ernst Haeckel.
On their 1960 descent, the crew of the Trieste noted that the floor consisted of diatomaceous ooze and reported observing "some type of flatfish" lying on the seabed.
"... And as we were settling this final fathom, I saw a wonderful thing. Lying on the bottom just beneath us was some type of flatfish, resembling a sole, about 1 foot long and 6 inches across. Even as I saw him, his two round eyes on top of his head spied us — a monster of steel — invading his silent realm. Eyes? Why should he have eyes? Merely to see phosphorescence? The floodlight that bathed him was the first real light ever to enter this hadal realm. Here, in an instant, was the answer that biologists had asked for the decades. Could life exist in the greatest depths of the ocean? It could! And not only that, here apparently, was a true, bony teleost fish, not a primitive ray or elasmobranch. Yes, a highly evolved vertebrate, in time's arrow very close to man himself. Slowly, extremely slowly, this flatfish swam away. Moving along the bottom, partly in the ooze and partly in the water, he disappeared into his night. Slowly too — perhaps everything is slow at the bottom of the sea — Walsh and I shook hands.
Many marine biologists are now skeptical of this supposed sighting, and it is suggested that the creature may instead have been a sea cucumber. The video camera on board the Kaiko probe spotted a sea cucumber, a scale worm and a shrimp at the bottom. At the bottom of the Challenger deep, the Nereus probe spotted one polychaete worm (a multi-legged predator) about an inch long.
An analysis of the sediment samples collected by Kaiko found large numbers of simple organisms at 10,900 m (35,800 ft). While similar lifeforms have been known to exist in shallower ocean trenches (> 7,000 m) and on the abyssal plain, the lifeforms discovered in the Challenger Deep possibly represent taxa distinct from those in shallower ecosystems.
Most of the organisms collected were simple, soft-shelled foraminifera (432 species according to National Geographic), with four of the others representing species of the complex, multi-chambered genera Leptohalysis and Reophax. Eighty-five percent of the specimens were organic, soft-shelled allogromiids, which is unusual compared to samples of sediment-dwelling organisms from other deep-sea environments, where the percentage of organic-walled foraminifera ranges from 5% to 20%. As small organisms with hard, calcareous shells have trouble growing at extreme depths because of the high solubility of calcium carbonate in the pressurized water, scientists theorize that the preponderance of soft-shelled organisms in the Challenger Deep may have resulted from the typical biosphere present when the Challenger Deep was shallower than it is now. Over the course of six to nine million years, as the Challenger Deep grew to its present depth, many of the species present in the sediment died out or were unable to adapt to the increasing water pressure and changing environment. The species that survived the change in depth were the ancestors of the Challenger Deep's current denizens.
On 17 March 2013, researchers reported data that suggested microbial life forms thrive in the Challenger Deep. Other researchers reported related studies that microbes thrive inside rocks up to 1900 feet below the sea floor under 8500 feet of ocean off the coast of the northwestern United States. According to one of the researchers, "You can find microbes everywhere — they're extremely adaptable to conditions, and survive wherever they are."