
 | ||
A motor is an actuator, converting electrical energy in to rotational mechanical energy. Motor requiring DC supply for operation is termed as DC motor. DC motors are widely used in control applications like robotics, tape drives, machines and many more. Separately excited DC motors are suitable for control applications because of separate field and armature circuit. Two ways to control DC separately excited motors are:
Contents
1. Armature Control.
2. Field Control.
Modelling of armature control DC motor is discussed in the article.
Basic operating mechanism of a DC motor
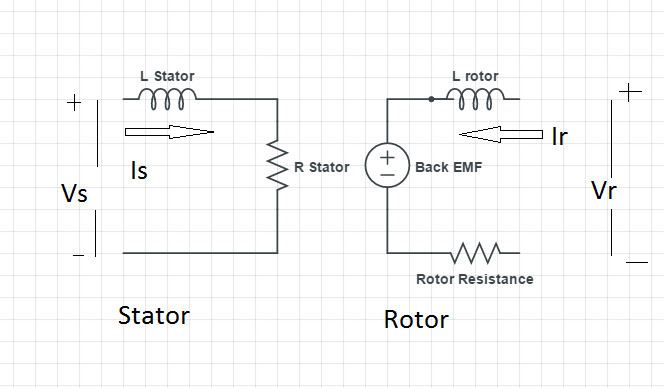
DC motor consists of two parts i.e. rotor and stator. Stator consists of field winding while rotor (also called armature) consists of armature winding. When both armature and field are excited by DC supply, current flows through windings and magnetic flux proportional to the current is produced. When the flux of field interacts with the flux of armature, it results in motion of the rotor.Armature control is the most common control technique for DC motors. In order to implement this control, the flux is required to be kept constant. . To this aim, either the stator voltage is constant or the stator coils are replaced by a permanent magnet. In the latter case, the motor is said to be a permanent magnet DC motor and is driven by means of the only armature coils.
As in armature control, field flux is constant; equations governing operation of motor become linear that is
where T is motor torque, Φ is flux and Ι is armature current. When field flux is constant, equation (1) becomes
where
In addition, the motor has an intrinsic negative feedback structure, hence at the steady state, the speed ω is proportional to the reference input Va.
These two facts, in addition to the cheaper price of a permanent magnet motor with respect to a standard DC motor (as a matter of fact only the rotor coils need to be winded), are the main reasons why armature controlled motors are widely used. However, several disadvantages arise from this control technique, of which major is the flow of large currents during transients. For example when started speed ω is zero initially hence back EMF (Electromotive Force) governed by the following relation, would be zero.
And also armature current is given by
will be very high causing increase in heating of machine and it may damage the insulation.
Transfer Function
Essential Equations [1]:
Electrical Equations:
Block Diagram of Separately Excited DC Motor is given in Fig.2
Various parameters in figure are described as
The transfer matrix of the system may be written as
where