
 | ||
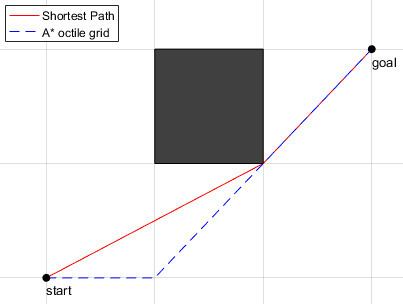
Any-angle path planning algorithms are a subset of pathfinding algorithms that search for a path between two points in space and allow the turns in the path to have any angle. The result is a path that goes directly toward the goal and has relatively few turns. Other pathfinding algorithms such as A* constrain the paths to a grid, which produces jagged, indirect paths. Any-angle algorithms are able to find optimal or near-optimal paths by incorporating the any-angle search into the algorithm itself. Algorithms such as A* Post Smoothing that smooth a path found by a grid constrained algorithm are unable to reliably find optimal paths since they cannot change what side of a blocked cell is traversed.
Contents
Motivation
Any-angle path planning algorithms are necessary in order to quickly find an optimal path. For a world represented by a grid of blocked and unblocked cells, the brute-force way to find an any-angle path is to search the corresponding visibility graph. This is problematic since the number of edges in a graph with
A*-based
So far, four main any-angle path planning algorithms that are based on the heuristic search algorithm A* have been developed, all of which propagate information along grid edges:
RRT-based
Besides, for search in high-dimensional search spaces, such as when the configuration space of the system involves many degrees of freedom that need to be considered (see Motion planning), and/or momentum needs to be considered (which could effectively double the number of dimensions of the search space; this larger space including momentum is known as the phase space), variants of the rapidly-exploring random tree (RRT) have been developed that (almost surely) converge to the optimal path by increasingly finding shorter and shorter paths:
Applications
Hybrid A* was created by Stanford Racing as part of the navigation system for Junior, their entry to the DARPA Urban Challenge. Hybrid A* is continuous and tracks the vehicle's position and orientation. This ensures that the path generated can be followed by the vehicle, unlike the paths generated by A* for Field D*, which both produce sharp turns, and do not consider the geometry or movement constrains of the vehicle.