
 | ||
In mathematics, the Abel transform, named for Niels Henrik Abel, is an integral transform often used in the analysis of spherically symmetric or axially symmetric functions. The Abel transform of a function f(r) is given by:
Contents
- Geometrical interpretation
- Verification of the inverse Abel transform
- Generalization of the Abel transform to discontinuous Fy
- Relationship to the Fourier and Hankel transforms
- Relationship to the Radon transform
- References
Assuming f(r) drops to zero more quickly than 1/r, the inverse Abel transform is given by
In image analysis, the forward Abel transform is used to project an optically thin, axially symmetric emission function onto a plane, and the reverse Abel transform is used to calculate the emission function given a projection (i.e. a scan or a photograph) of that emission function.
In absorption spectroscopy of cylindrical flames or plumes, the forward Abel transform is the integrated absorbance along a ray with closest distance y from the center of the flame, while the inverse Abel transform gives the local absorption coefficient at a distance r from the center. Abel transform is limited to applications with axially symmetric geometries. For more general asymmetrical cases, more general-oriented reconstruction algorithms such as Algebraic Reconstruction Technique (ART), Maximum Likelihood Expectation Maximization (MLEM), Filtered Back-Projection (FBP) algorithms should be employed.
In recent years, the inverse Abel transformation (and its variants) has become the cornerstone of data analysis in photofragment-ion imaging and photoelectron imaging. Among recent most notable extensions of inverse Abel transformation are the Onion Peeling and BAsis Set Expansion (BASEX) methods of photoelectron and photoion image analysis.
Geometrical interpretation
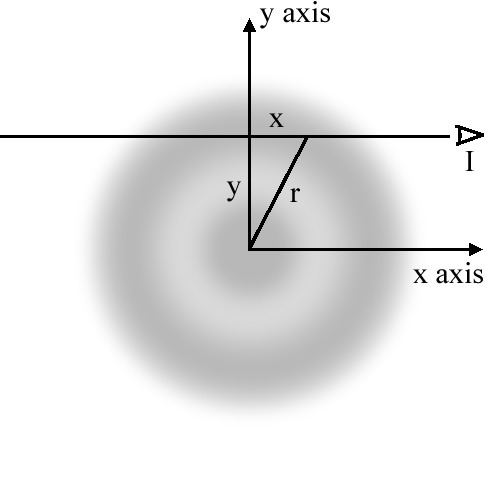
In two dimensions, the Abel transform F(y) can be interpreted as the projection of a circularly symmetric function f(r) along a set of parallel lines of sight which are a distance y from the origin. Referring to the figure on the right, the observer (I) will see
where f(r) is the circularly symmetric function represented by the gray color in the figure. It is assumed that the observer is actually at x = ∞ so that the limits of integration are ±∞ and all lines of sight are parallel to the x-axis. Realizing that the radius r is related to x and y via r2 = x2 + y2, it follows that
The path of integration in r does not pass through zero, and since both f(r) and the above expression for dx are even functions, we may write:
Substituting the expression for dx in terms of r and rewriting the integration limits accordingly yields the Abel transform.
The Abel transform may be extended to higher dimensions. Of particular interest is the extension to three dimensions. If we have an axially symmetric function f(ρ,z) where ρ2 = x2 + y2 is the cylindrical radius, then we may want to know the projection of that function onto a plane parallel to the z axis. Without loss of generality, we can take that plane to be the yz-plane so that
which is just the Abel transform of f(ρ,z) in ρ and y.
A particular type of axial symmetry is spherical symmetry. In this case, we have a function f(r) where r2 = x2 + y2 + z2. The projection onto, say, the yz-plane will then be circularly symmetric and expressible as F(s) where s2 = y2 + z2. Carrying out the integration, we have:
which is again, the Abel transform of f(r) in r and s.
Verification of the inverse Abel transform
Assuming f is continuously differentiable and f, f' drop to zero faster than 1/r, we can set
Differentiating formally,
Now plug this into the inverse Abel transform formula:
By Fubini's theorem, the last integral equals
Generalization of the Abel transform to discontinuous F(y)
Consider the case where
The Abel transform of a function f(r) is under these circumstances again given by:
Assuming f(r) drops to zero more quickly than 1/r, the inverse Abel transform is however given by
where
Relationship to the Fourier and Hankel transforms
The Abel transform is one member of the FHA cycle of integral operators. For example, in two dimensions, if we define A as the Abel transform operator, F as the Fourier transform operator and H as the zeroth-order Hankel transform operator, then the special case of the Projection-slice theorem for circularly symmetric functions states that:
In other words, applying the Abel transform to a 1-dimensional function and then applying the Fourier transform to that result is the same as applying the Hankel transform to that function. This concept can be extended to higher dimensions.
Relationship to the Radon transform
The Abel transform is a projection of f(r) along a particular axis. The two-dimensional Radon transform gives the Abel transform as a function of not only the distance along the viewing axis, but of the angle of the viewing axis as well.