
 | ||
Wi-Fi positioning system (WPS) or WiPS/WFPS is used where GPS and GLONASS are inadequate due to various causes including multipath and signal blockage indoors. Such systems include indoor positioning systems. Wi-Fi positioning takes advantage of the rapid growth in the early 21st century of wireless access points in urban areas.
Contents
- Motivation and applications
- Problem statement and basic concepts
- RSSI and lateration based
- Fingerprinting based
- Angle of arrival based
- Time of flight Tof based
- Ubiquitous indoor localization on a world wide scale
- Privacy concerns
- Public Wi Fi location databases
- References
The most common and widespread localization technique used for positioning with wireless access points is based on measuring the intensity of the received signal (received signal strength indication or RSSI) and the method of "fingerprinting". Typical parameters useful to geolocate the Wi-Fi hotspot or wireless access point include the SSID and the MAC address of the access point. The accuracy depends on the number of positions that have been entered into the database. The Wi-Fi hotspot database gets filled by correlating mobile device GPS location data with Wi-Fi hotspot MAC addresses. The possible signal fluctuations that may occur can increase errors and inaccuracies in the path of the user. To minimize fluctuations in the received signal, there are certain techniques that can be applied to filter the noise.
In the case of low precision, some techniques have been proposed to merge the Wi-Fi traces with other data sources such as geographical information and time constraints (i.e., time geography).
Motivation and applications
Accurate indoor localization is becoming more important for Wi-Fi based devices due to the increased use of augmented reality, social networking, health care monitoring, personal tracking, inventory control and other indoor location-aware applications.
The popularity and low price of Wi-Fi network interface cards is an attractive incentive to use Wi-Fi as the basis for a localization system and significant research has been done in this area in the past 15 years.
Problem statement and basic concepts
The problem of Wi-Fi based indoor localization of a device consists in determining the position of client devices with respect to access points. Many techniques exist to accomplish this, and these may be classified into four main types: received signal strength indication (RSSI), fingerprinting, angle of arrival (AoA) and time of flight (ToF) based techniques.
In most cases the first step to determine a device's position is to determine the distance between the target client device and a few access points. With the known distances between the target device and access points, trilateration algorithms may be used to determine the relative position of the target device, using the known position of access points as a reference. Alternatively, the angle of arriving signals at a target client device can be employed to determine the device's location based on triangulation algorithms.
A combination of these techniques may be used to increase the accuracy of the system.
RSSI and lateration based
RSSI localization techniques are based on measuring signal strength from a client device to several different access points, and then combining this information with a propagation model to determine the distance between the client device and the access points. Trilateration (sometimes called multilateration) techniques can be used to calculate the estimated client device position relative to the known position of access points.
Though one of the cheapest and easiest methods to implement, its disadvantage is that it does not provide very good accuracy (median of 2-4m), because the RSSI measurements tend to fluctuate according to changes in the environment or multipath fading.
Fingerprinting based
Traditional fingerprinting is also RSSI-based, but it simply relies on the recording of the signal strength from several access points in range and storing this information in a database along with the known coordinates of the client device in an offline phase. This information can be deterministic or probabilistic. During the online tracking phase, the current RSSI vector at an unknown location is compared to those stored in the fingerprint and the closest match is returned as the estimated user location. Such systems may provide a median accuracy of 0.6m and tail accuracy of 1.3m.
Its main disadvantage is that any changes of the environment such as adding or removing furniture or buildings may change the "fingerprint" that corresponds to each location, requiring an update to the fingerprint database. However, the integration with other sensor such as camera can be used in order to deal with changing environment.
Angle of arrival based
With the advent of MIMO WiFi interfaces, which use multiple antennas, it is possible to estimate the AoA of the multipath signals received at the antenna arrays in the access points, and apply triangulation to calculate the location of client devices. SpotFi, ArrayTrack and LTEye are proposed solutions which employ this kind of technique.
Typical computation of the AoA is done with the MUSIC algorithm. Assuming an antenna array of
Considering that the
Therefore, the following complex exponential can be used as a simplified representation of the phase shifts experienced by each antenna as a function of the AoA of the propagation path:
This is where the MUSIC algorithm is applied in, first by computing the eigenvectors of
Though this technique is usually more accurate than others, it may require special hardware in order to be deployed, such as an array of six to eight antennas or rotating antennas. SpotFi proposes the use of a superresolution algorithm which takes advantage of the number of measurements taken by each of the antennas of the WiFi cards with only three antennas, and also incorporates ToF based localization to improve its accuracy.
Time of flight (Tof) based
This localization approach takes timestamps provided by the wireless interfaces to calculate the ToF of signals and then use this information to estimate the distance and relative position of one client device with respect to access points. The granularity of such time measurements is in the order of nanoseconds and systems which use this technique have reported localization errors in the order of 2m. Typical applications for this technology are tagging and locating assets in buildings, for which room-level accuracy (~3m) is usually enough.
The time measurements taken at the wireless interfaces are based on the fact that RF waves travel close to the speed of light, which remains nearly constant in most propagation media in indoor environments. Therefore, the signal propagation speed (and consequently the ToF) is not affected so much by the environment as the RSSI measurements are.
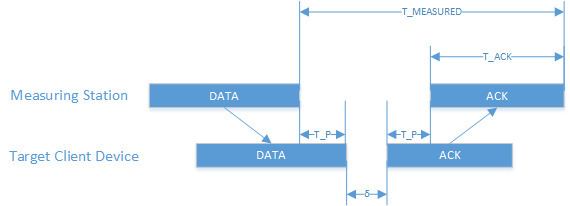
Unlike traditional ToF-based echo techniques, such as those used in RADAR systems, Wi-Fi echo techniques use regular data and acknowledgement communication frames to measure the ToF.
As in the RSSI approach, the ToF is used only to estimate the distance between the client device and access points. Then a trilateration technique can be used to calculate the estimated position of the device relative to the access points. The greatest challenges in the ToF approach consist in dealing with clock synchronization issues, noise, sampling artifacts and multipath channel effects. Some techniques uses mathematical approaches to remove the need for clock synchronization.
Ubiquitous indoor localization on a world-wide scale
Recently, researchers have envisioned an Indoor Positioning System (IPS) that can perform ubiquitous indoor localization on a worldwide scale, similar to the GPS outdoors. The idea is to leverage the sensors embedded in today's smartphones in a crowd-sourcing manner to automatically construct the indoor floorplans as well as automatically construct the WiFi fingerprint. This not only automatically builds the fingerprints on a worldwide scale, but also keeps the constructed fingerprints up-to-date.
Privacy concerns
Citing the specific privacy concerns arising out of WPS, Google suggested a unified approach for opting-out a particular access point from taking part in determining location using WPS. Appending "_nomap" to a wireless access point's SSID excludes it from Google's WPS database. Google hopes that other WPS providers and data collectors, like Apple and Microsoft, follow that recommendation so that it becomes an accepted standard. Mozilla honors _nomap as a method of opting-out of its location service.
Public Wi-Fi location databases
A number of public Wi-Fi location databases are available (only active projects):