
 | ||
Uncertainty theory is a branch of mathematics based on normality, monotonicity, self-duality, countable subadditivity, and product measure axioms. It was founded by Baoding Liu in 2007 and refined in 2009.
Contents
- Four axioms
- Uncertain variables
- Uncertainty distribution
- Independence
- Operational law
- Expected Value
- Variance
- Critical value
- Entropy
- Inequalities
- Convergence concept
- Conditional uncertainty
- References
Mathematical measures of the likelihood of an event being true include probability theory, capacity, fuzzy logic, possibility, and credibility, as well as uncertainty.
Four axioms
Axiom 1. (Normality Axiom)
Axiom 2. (Self-Duality Axiom)
Axiom 3. (Countable Subadditivity Axiom) For every countable sequence of events Λ1, Λ2, ..., we have
Axiom 4. (Product Measure Axiom) Let
Principle. (Maximum Uncertainty Principle) For any event, if there are multiple reasonable values that an uncertain measure may take, then the value as close to 0.5 as possible is assigned to the event.
Uncertain variables
An uncertain variable is a measurable function ξ from an uncertainty space
Uncertainty distribution
Uncertainty distribution is inducted to describe uncertain variables.
Definition:The uncertainty distribution
Theorem(Peng and Iwamura, Sufficient and Necessary Condition for Uncertainty Distribution) A function
Independence
Definition: The uncertain variables
for any Borel sets
Theorem 1: The uncertain variables
for any Borel sets
Theorem 2: Let
Theorem 3: Let
for any real numbers
Operational law
Theorem: Let
where
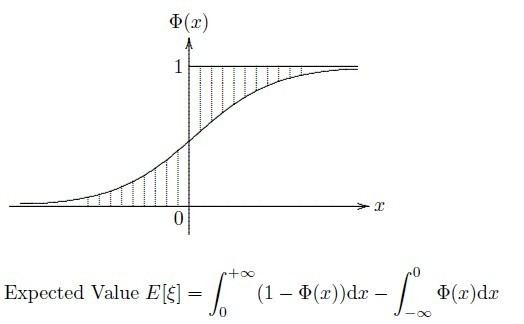
Expected Value
Definition: Let
provided that at least one of the two integrals is finite.
Theorem 1: Let
Theorem 2: Let
Theorem 3: Let
Variance
Definition: Let
Theorem: If
Critical value
Definition: Let
is called the α-optimistic value to
is called the α-pessimistic value to
Theorem 1: Let
Theorem 2: Let
Theorem 3: Suppose that
Entropy
Definition: Let
where
Theorem 1(Dai and Chen): Let
Theorem 2: Let
Theorem 3: Let
Inequalities
Theorem 1(Liu, Markov Inequality): Let
Theorem 2 (Liu, Chebyshev Inequality) Let
Theorem 3 (Liu, Holder’s Inequality) Let
Theorem 4:(Liu [127], Minkowski Inequality) Let
Convergence concept
Definition 1: Suppose that
for every
Definition 2: Suppose that
for every
Definition 3: Suppose that
Definition 4: Suppose that
Theorem 1: Convergence in Mean
Conditional uncertainty
Definition 1: Let
Theorem 1: Let
Definition 2: Let
Definition 3: The conditional uncertainty distribution
provided that
Theorem 2: Let
Theorem 3: Let
Definition 4: Let
provided that at least one of the two integrals is finite.