
 | ||
Space-time adaptive processing (STAP) is a signal processing technique most commonly used in radar systems. It involves adaptive array processing algorithms to aid in target detection. Radar signal processing benefits from STAP in areas where interference is a problem (i.e. ground clutter, jamming, etc.). Through careful application of STAP, it is possible to achieve order-of-magnitude sensitivity improvements in target detection.
Contents
- History
- Motivation and Applications
- Basic theory
- Approaches
- Direct Methods
- Reduced Rank Methods
- Model Based Methods
- Modern applications
- MIMO Communications
- MIMO Radar
- References
STAP involves a two-dimensional filtering technique using a phased-array antenna with multiple spatial channels. Coupling multiple spatial channels with pulse-Doppler waveforms lends to the name "space-time." Applying the statistics of the interference environment, an adaptive STAP weight vector is formed. This weight vector is applied to the coherent samples received by the radar.
History
The theory of STAP was first published by Lawrence E. Brennan and Irving S. Reed in the early 1970s. At the time of publication, both Brennan and Reed were at Technology Service Corporation (TSC). While it was formally introduced in 1973, it has theoretical roots dating back to 1959.
Motivation and Applications
For ground-based radar, cluttered returns tend to be at DC, making them easily discriminated by Moving Target Indication (MTI). Thus, a notch filter at the zero-Doppler bin can be used. Airborne platforms with ownship motion experience relative ground clutter motion dependent on the angle, resulting in angle-Doppler coupling at the input. In this case, 1D filtering is not sufficient, since clutter can overlap the desired target's Doppler from multiple directions. The resulting interference is typically called a "clutter ridge," since it forms a line in the angle-Doppler domain. Narrowband jamming signals are also a source of interference, and exhibit significant spatial correlation. Thus receiver noise and interference must be considered, and detection processors must attempt to maximize the signal-to-interference and noise ratio (SINR).
While primarily developed for radar, STAP techniques have applications for communications systems.
Basic theory
STAP is essentially filtering in the space-time domain. This means that we are filtering over multiple dimensions, and multi-dimensional signal processing techniques must be employed. The goal is to find the optimal space-time weights in
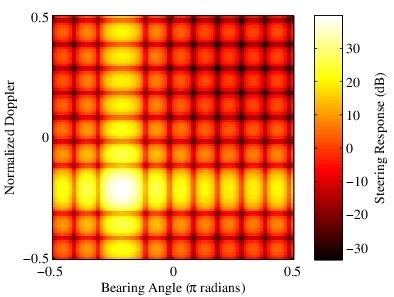
A simple, trivial example of STAP is shown in the first figure, for
The basic functional diagram is shown to the right. For each antenna, a down conversion and analog-to-digital conversion step is typically completed. Then, a 1-D FIR filter with PRI length delay elements is used for each steered antenna channel. The lexicographically ordered weights
where
where
Approaches
The various approaches can be broken down by processing taxonomy, or by simplifying the data space / data sources.
Direct Methods
The optimum solution is using all degrees of freedom by processing the adaptive filter on the antenna elements. For adaptive direct methods, Sample Matrix Inversion (SMI) uses the estimated (sample) interference covariance matrix in place of the actual interference covariance matrix. This is because the actual interference covariance matrix is not known in practice. If it is known by some means, then it need not be estimated, and the optimal weights are fixed. This is sometimes called the data-independent variation. The data-dependent variation estimates the interference covariance matrix from the data. In MIMO communications systems, this can be done via a training sequence. The clairvoyant detector is given when the covariance matrix is known perfectly and defined as:
where
where
The main problem with direct methods is the great computational complexity associated with the estimation and inversion of matrices formed from many degrees of freedom (large number of elements and or pulses). In addition, for methods where
Reduced Rank Methods
Reduced rank methods aim to overcome the computational burdens of the direct method by reducing the dimensionality of the data or the rank of the interference covariance matrix. This can be accomplished by forming beams and performing STAP on the beamspace. Both pre and post Doppler methods can be used in the beamspace. Post Doppler methods may also be used on the full antenna element input as well to reduce the data in this dimension only. A popular example is displaced phase center antenna (DPCA), which is a form of data-independent STAP in the beamspace, pre-Doppler. The goal is to perform beamforming such that the beam appears stationary as the airborne radar is in motion over discrete time periods so the clutter appears without Doppler. However, phase errors can cause significant degradation since the algorithm is not adaptive to the returned data. Many other methods may be used to reduce the rank of the interference covariance matrix, and so all methods in the reduced rank category can be thought of as simplifying the covariance matrix to be inverted:
Post-Doppler methods decompose the STAP problem from an
Since these methods reduce the data dimensionality, they are inherently sub-optimal. There are a number of techniques to compare the performance of reduced-rank methods and estimated direct methods to clairvoyant STAP (direct with perfect knowledge of interference covariance matrix and target steering vector), mostly based around SINR loss. One such example is
where we've taken the ratio of the SINR evaluated with the sub-optimal weights
Model Based Methods
There are also model based methods that attempt to force or exploit the structure of the covariance interference matrix. The more generally applicable of these methods is the covariance taper matrix structure. The goal is to compactly model the interference, at which point it can then be processed using principal component techniques or diagonal-loading SMI (where a small magnitude, random diagonal matrix is added to attempt to stabilize the matrix prior to inverting). This modeling has an added benefit of decorrelating interference subspace leakage (ISL), and is resistant to internal clutter motion (ICM). The principal component method firsts applies principal component analysis to estimate the dominate eigenvalues and eigenvectors, and then applies a covariance taper and adds an estimated noise floor:
where
where
More restrictive examples involve modeling the interference to force Toeplitz structures, and can greatly reduce the computational complexity associated with the processing by exploiting this structure. However, these methods can suffer due to model-mismatch, or the computational savings may be undone by the problem of model fitting (such as the nonlinear problem of fitting to a Toeplitz or block-Toeplitz matrix) and order estimation.
Modern applications
Despite nearly 40 years of existence, STAP has modern applications.
MIMO Communications
For dispersive channels, multiple-input multiple-output communications can formulate STAP solutions. Frequency-selective channel compensation can be used to extend traditional equalization techniques for SISO systems using STAP. To estimate the transmitted signal
to minimize the mean squared error (MSE). Using STAP with a training sequence
MIMO Radar
STAP has been extended for MIMO radar to improve spatial resolution for clutter, using modified SIMO radar STAP techniques. New algorithms and formulations are required that depart from the standard technique due to the large rank of the jammer-clutter subspace created by MIMO radar virtual arrays, which typically involving exploiting the block diagonal structure of the MIMO interference covariance matrix to break the large matrix inversion problem into smaller ones. In comparison with SIMO radar systems, which will have