
 | ||
The Smith predictor (invented by O. J. M. Smith in 1957) is a type of predictive controller for systems with pure time delay. The idea can be illustrated as follows.
Suppose the plant consists of
As a first step, suppose we only consider
Next, our objective is to design a controller
Solving
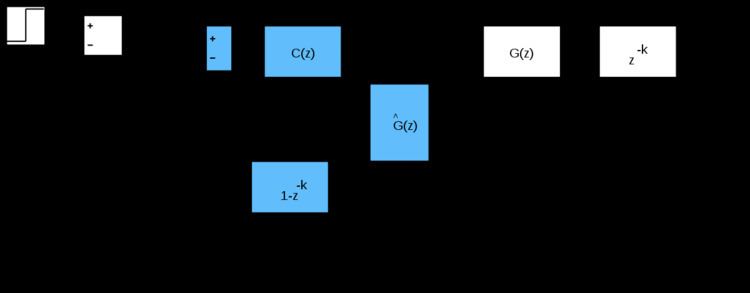
Note that there are two feedback loops. The outer control loop feeds the output back to the input, as usual. However, this loop alone would not provide satisfactory control, because of the delay; this loop is feeding back outdated information. Intuitively, for the k seconds during which no fresh information is available, the system is controlled by the inner loop which contains a predictor of what the (unobservable) output of the plant G currently is.
To check that this works, a re-arrangement can be made as follows:
Here we can see that if the model used in the controller,