
 | ||
In probability and statistics, the skewed generalized “t” distribution is a family of continuous probability distributions. The distribution was first introduced by Panayiotis Theodossiou in 1998. The distribution has since been used in different applications. There are different parameterizations for the skewed generalized t distribution, which we account for in this article.
Contents
- Probability density function
- Moments
- Special Cases
- skewed generalized error distribution
- generalized t distribution
- skewed t distribution
- skewed Laplace distribution
- generalized error distribution
- skewed normal distribution
- students t distribution
- skewed Cauchy distribution
- Laplace distribution
- Uniform Distribution
- Normal distribution
- Cauchy Distribution
- References
Probability density function
where
In the original parameterization of the skewed generalized t distribution,
and
These values for
The parameterization that yields the simplest functional form of the probability density function sets
and a variance of
The
Since
Finally,
Moments
Let
The mean, for
The variance (i.e.
The skewness (i.e.
The kurtosis (i.e.
Special Cases
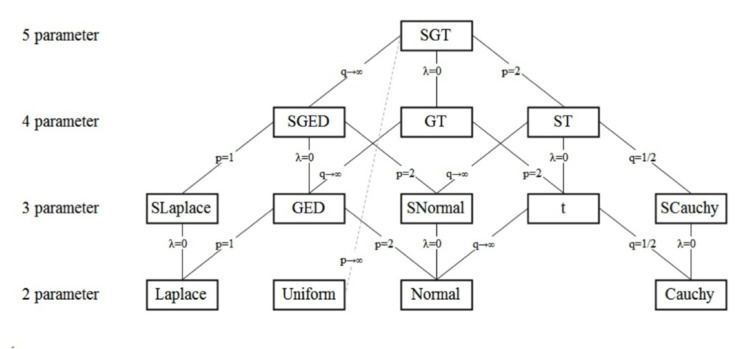
Special and limiting cases of the skewed generalized t distribution include the skewed generalized error distribution, the generalized t distribution introduced by McDonald and Newey, the skewed t proposed by Hansen, the skewed Laplace distribution, the generalized error distribution (also known as the generalized normal distribution), a skewed normal distribution, the student t distribution, the skewed Cauchy distribution, the Laplace distribution, the uniform distribution, the normal distribution, and the Cauchy distribution. The graphic below, adapted from Hansen, McDonald, and Newey, shows which parameters should be set to obtain some of the different special values of the skewed generalized t distribution.
skewed generalized error distribution
The Skewed Generalized Error Distribution has the pdf:
where
gives a mean of
gives a variance of
generalized t distribution
The Generalized T Distribution has the pdf:
where
gives a variance of
skewed t distribution
The Skewed T Distribution has the pdf:
where
gives a mean of
gives a variance of
skewed Laplace distribution
The Skewed Laplace Distribution has the pdf:
where
gives a mean of
gives a variance of
generalized error distribution
The Generalized Error Distribution (also known as the generalized normal distribution) has the pdf:
where
gives a variance of
skewed normal distribution
The Skewed Normal Distribution has the pdf:
where
gives a mean of
gives a variance of
student's t-distribution
The Student's t-distribution has the pdf:
Note that we substituted
skewed Cauchy distribution
The Skewed Cauchy Distribution has the pdf:
Note that we substituted
Laplace distribution
The Laplace distribution has the pdf:
Note that we substituted
Uniform Distribution
The Uniform distribution has the pdf:
Thus the standard uniform parameterization is obtained if
Normal distribution
The Normal distribution has the pdf:
where
gives a variance of
Cauchy Distribution
The Cauchy distribution has the pdf:
Note that we substituted