
 | ||
The Shapley–Folkman lemma is a result in convex geometry with applications in mathematical economics that describes the Minkowski addition of sets in a vector space. Minkowski addition is defined as the addition of the sets' members: for example, adding the set consisting of the integers zero and one to itself yields the set consisting of zero, one, and two:
Contents
- Introductory example
- Preliminaries
- Real vector spaces
- Convex sets
- Convex hull
- Minkowski addition
- Convex hulls of Minkowski sums
- Statements
- Lemma of Shapley and Folkman
- Dimension of a real vector space
- ShapleyFolkman theorem and Starrs corollary
- Proofs and computations
- Applications
- Economics
- Non convex preferences
- Starrs 1969 paper and contemporary economics
- Mathematical optimization
- Preliminaries of optimization theory
- Additive optimization problems
- Probability and measure theory
- References
The Shapley–Folkman lemma and related results provide an affirmative answer to the question, "Is the sum of many sets close to being convex?" A set is defined to be convex if every line segment joining two of its points is a subset in the set: For example, the solid disk
The Shapley–Folkman lemma was introduced as a step in the proof of the Shapley–Folkman theorem, which states an upper bound on the distance between the Minkowski sum and its convex hull. The convex hull of a set Q is the smallest convex set that contains Q. This distance is zero if and only if the sum is convex. The theorem's bound on the distance depends on the dimension D and on the shapes of the summand-sets, but not on the number of summand-sets N, when N > D. The shapes of a subcollection of only D summand-sets determine the bound on the distance between the Minkowski average of N sets
1⁄N (Q1 + Q2 + ... + QN)and its convex hull. As N increases to infinity, the bound decreases to zero (for summand-sets of uniformly bounded size). The Shapley–Folkman theorem's upper bound was decreased by Starr's corollary (alternatively, the Shapley–Folkman–Starr theorem).
The lemma of Lloyd Shapley and Jon Folkman was first published by the economist Ross M. Starr, who was investigating the existence of economic equilibria while studying with Kenneth Arrow. In his paper, Starr studied a convexified economy, in which non-convex sets were replaced by their convex hulls; Starr proved that the convexified economy has equilibria that are closely approximated by "quasi-equilibria" of the original economy; moreover, he proved that every quasi-equilibrium has many of the optimal properties of true equilibria, which are proved to exist for convex economies. Following Starr's 1969 paper, the Shapley–Folkman–Starr results have been widely used to show that central results of (convex) economic theory are good approximations to large economies with non-convexities; for example, quasi-equilibria closely approximate equilibria of a convexified economy. "The derivation of these results in general form has been one of the major achievements of postwar economic theory", wrote Roger Guesnerie. The topic of non-convex sets in economics has been studied by many Nobel laureates, besides Lloyd Shapley who won the prize in 2012: Arrow (1972), Robert Aumann (2005), Gérard Debreu (1983), Tjalling Koopmans (1975), Paul Krugman (2008), and Paul Samuelson (1970); the complementary topic of convex sets in economics has been emphasized by these laureates, along with Leonid Hurwicz, Leonid Kantorovich (1975), and Robert Solow (1987).
The Shapley–Folkman lemma has applications also in optimization and probability theory. In optimization theory, the Shapley–Folkman lemma has been used to explain the successful solution of minimization problems that are sums of many functions. The Shapley–Folkman lemma has also been used in proofs of the "law of averages" for random sets, a theorem that had been proved for only convex sets.
Introductory example
For example, the subset of the integers {0, 1, 2} is contained in the interval of real numbers [0, 2], which is convex. The Shapley–Folkman lemma implies that every point in [0, 2] is the sum of an integer from {0, 1} and a real number from [0, 1].
The distance between the convex interval [0, 2] and the non-convex set {0, 1, 2} equals one-half
1/2 = |1 − 1/2| = |0 − 1/2| = |2 − 3/2| = |1 − 3/2|.However, the distance between the average Minkowski sum
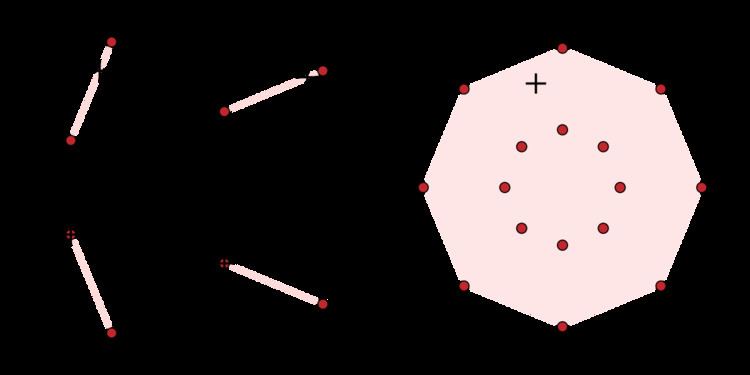
1/2 ( {0, 1} + {0, 1} ) = {0, 1/2, 1}and its convex hull [0, 1] is only 1/4, which is half the distance (1/2) between its summand {0, 1} and [0, 1]. As more sets are added together, the average of their sum "fills out" its convex hull: The maximum distance between the average and its convex hull approaches zero as the average includes more summands.
Preliminaries
The Shapley–Folkman lemma depends upon the following definitions and results from convex geometry.
Real vector spaces
A real vector space of two dimensions can be given a Cartesian coordinate system in which every point is identified by an ordered pair of real numbers, called "coordinates", which are conventionally denoted by x and y. Two points in the Cartesian plane can be added coordinate-wise
(x1, y1) + (x2, y2) = (x1+x2, y1+y2);further, a point can be multiplied by each real number λ coordinate-wise
λ (x, y) = (λx, λy).More generally, any real vector space of (finite) dimension D can be viewed as the set of all D-tuples of D real numbers { (v1, v2, . . . , vD) } on which two operations are defined: vector addition and multiplication by a real number. For finite-dimensional vector spaces, the operations of vector addition and real-number multiplication can each be defined coordinate-wise, following the example of the Cartesian plane.
Convex sets
In a real vector space, a non-empty set Q is defined to be convex if, for each pair of its points, every point on the line segment that joins them is a subset of Q. For example, a solid disk
More formally, a set Q is convex if, for all points v0 and v1 in Q and for every real number λ in the unit interval [0,1], the point
(1 − λ) v0 + λv1is a member of Q.
By mathematical induction, a set Q is convex if and only if every convex combination of members of Q also belongs to Q. By definition, a convex combination of an indexed subset {v0, v1, . . . , vD} of a vector space is any weighted average λ0v0 + λ1v1 + . . . + λDvD, for some indexed set of non-negative real numbers {λd} satisfying the equation λ0 + λ1 + . . . + λD = 1.
The definition of a convex set implies that the intersection of two convex sets is a convex set. More generally, the intersection of a family of convex sets is a convex set. In particular, the intersection of two disjoint sets is the empty set, which is convex.
Convex hull
For every subset Q of a real vector space, its convex hull Conv(Q) is the minimal convex set that contains Q. Thus Conv(Q) is the intersection of all the convex sets that cover Q. The convex hull of a set can be equivalently defined to be the set of all convex combinations of points in Q. For example, the convex hull of the set of integers {0,1} is the closed interval of real numbers [0,1], which contains the integer end-points. The convex hull of the unit circle is the closed unit disk, which contains the unit circle.
Minkowski addition
In a real vector space, the Minkowski sum of two (non-empty) sets Q1 and Q2 is defined to be the set Q1 + Q2 formed by the addition of vectors element-wise from the summand sets
Q1 + Q2 = { q1 + q2 : q1 ∈ Q1 and q2 ∈ Q2 }.For example
{0, 1} + {0, 1} = {0+0, 0+1, 1+0, 1+1} = {0, 1, 2}.By the principle of mathematical induction, the Minkowski sum of a finite family of (non-empty) sets
{Qn : Qn ≠ Ø and 1 ≤ n ≤ N }is the set formed by element-wise addition of vectors
∑ Qn = {∑ qn : qn ∈ Qn}.Convex hulls of Minkowski sums
Minkowski addition behaves well with respect to "convexification"—the operation of taking convex hulls. Specifically, for all subsets Q1 and Q2 of a real vector space, the convex hull of their Minkowski sum is the Minkowski sum of their convex hulls. That is,
Conv( Q1 + Q2 ) = Conv( Q1 ) + Conv( Q2 ).This result holds more generally, as a consequence of the principle of mathematical induction. For each finite collection of sets,
Conv( ∑ Qn ) = ∑ Conv( Qn ).Statements
The preceding identity Conv( ∑ Qn ) = ∑ Conv( Qn ) implies that if a point x lies in the convex hull of the Minkowski sum of N sets
x ∈ Conv( ∑ Qn )then x lies in the sum of the convex hulls of the summand-sets
x ∈ ∑ Conv( Qn ).By the definition of Minkowski addition, this last expression means that x = ∑ qn for some selection of points qn in the convex hulls of the summand-sets, that is, where each qn ∈ Conv(Qn). In this representation, the selection of the summand-points qn depends on the chosen sum-point x.
Lemma of Shapley and Folkman
For this representation of the point x, the Shapley–Folkman lemma states that if the dimension D is less than the number of summands
D < Nthen convexification is needed for only D summand-sets, whose choice depends on x: The point has a representation
where qd belongs to the convex hull of Qd for D (or fewer) summand-sets and qn belongs to Qn itself for the remaining sets. That is,
for some re-indexing of the summand sets; this re-indexing depends on the particular point x being represented.
The Shapley–Folkman lemma implies, for example, that every point in [0, 2] is the sum of an integer from {0, 1} and a real number from [0, 1].
Dimension of a real vector space
Conversely, the Shapley–Folkman lemma characterizes the dimension of finite-dimensional, real vector spaces. That is, if a vector space obeys the Shapley–Folkman lemma for a natural number D, and for no number less than D, then its dimension is exactly D; the Shapley–Folkman lemma holds for only finite-dimensional vector spaces.
Shapley–Folkman theorem and Starr's corollary
Shapley and Folkman used their lemma to prove their theorem, which bounds the distance between a Minkowski sum and its convex hull, the "convexified" sum:
The Shapley–Folkman theorem states a bound on the distance between the Minkowski sum and its convex hull; this distance is zero if and only if the sum is convex. Their bound on the distance depends on the dimension D and on the shapes of the summand-sets, but not on the number of summand-sets N, when N > D.
The circumradius often exceeds (and cannot be less than) the inner radius:
Starr used the inner radius to reduce the upper bound stated in the Shapley–Folkman theorem:
Starr's corollary states an upper bound on the Euclidean distance between the Minkowski sum of N sets and the convex hull of the Minkowski sum; this distance between the sum and its convex hull is a measurement of the non-convexity of the set. For simplicity, this distance is called the "non-convexity" of the set (with respect to Starr's measurement). Thus, Starr's bound on the non-convexity of the sum depends on only the D largest inner radii of the summand-sets; however, Starr's bound does not depend on the number of summand-sets N, when N > D. For example, the distance between the convex interval [0, 2] and the non-convex set {0, 1, 2} equals one-half
1/2 = |1 − 1/2| = |0 − 1/2| = |2 − 3/2| = |1 − 3/2|.Thus, Starr's bound on the non-convexity of the average
1⁄N ∑ Qndecreases as the number of summands N increases. For example, the distance between the averaged set
1/2 ( {0, 1} + {0, 1} ) = {0, 1/2, 1}and its convex hull [0, 1] is only 1/4, which is half the distance (1/2) between its summand {0, 1} and [0, 1]. The shapes of a subcollection of only D summand-sets determine the bound on the distance between the average set and its convex hull; thus, as the number of summands increases to infinity, the bound decreases to zero (for summand-sets of uniformly bounded size). In fact, Starr's bound on the non-convexity of this average set decreases to zero as the number of summands N increases to infinity (when the inner radii of all the summands are bounded by the same number).
Proofs and computations
The original proof of the Shapley–Folkman lemma established only the existence of the representation, but did not provide an algorithm for computing the representation: Similar proofs have been given by Arrow and Hahn, Cassels, and Schneider, among others. An abstract and elegant proof by Ekeland has been extended by Artstein. Different proofs have appeared in unpublished papers, also. In 1981, Starr published an iterative method for computing a representation of a given sum-point; however, his computational proof provides a weaker bound than does the original result. An elementary proof of the Shapley–Folkman lemma in finite-dimensional space can be found in the book by Bertsekas together with applications in estimating the duality gap in separable optimization problems and zero-sum games.
Applications
The Shapley–Folkman lemma enables researchers to extend results for Minkowski sums of convex sets to sums of general sets, which need not be convex. Such sums of sets arise in economics, in mathematical optimization, and in probability theory; in each of these three mathematical sciences, non-convexity is an important feature of applications.
Economics
In economics, a consumer's preferences are defined over all "baskets" of goods. Each basket is represented as a non-negative vector, whose coordinates represent the quantities of the goods. On this set of baskets, an indifference curve is defined for each consumer; a consumer's indifference curve contains all the baskets of commodities that the consumer regards as equivalent: That is, for every pair of baskets on the same indifference curve, the consumer does not prefer one basket over another. Through each basket of commodities passes one indifference curve. A consumer's preference set (relative to an indifference curve) is the union of the indifference curve and all the commodity baskets that the consumer prefers over the indifference curve. A consumer's preferences are convex if all such preference sets are convex.
An optimal basket of goods occurs where the budget-line supports a consumer's preference set, as shown in the diagram. This means that an optimal basket is on the highest possible indifference curve given the budget-line, which is defined in terms of a price vector and the consumer's income (endowment vector). Thus, the set of optimal baskets is a function of the prices, and this function is called the consumer's demand. If the preference set is convex, then at every price the consumer's demand is a convex set, for example, a unique optimal basket or a line-segment of baskets.
Non-convex preferences
However, if a preference set is non-convex, then some prices determine a budget-line that supports two separate optimal-baskets. For example, we can imagine that, for zoos, a lion costs as much as an eagle, and further that a zoo's budget suffices for one eagle or one lion. We can suppose also that a zoo-keeper views either animal as equally valuable. In this case, the zoo would purchase either one lion or one eagle. Of course, a contemporary zoo-keeper does not want to purchase half of an eagle and half of a lion (or a griffin)! Thus, the zoo-keeper's preferences are non-convex: The zoo-keeper prefers having either animal to having any strictly convex combination of both.
When the consumer's preference set is non-convex, then (for some prices) the consumer's demand is not connected; a disconnected demand implies some discontinuous behavior by the consumer, as discussed by Harold Hotelling:
If indifference curves for purchases be thought of as possessing a wavy character, convex to the origin in some regions and concave in others, we are forced to the conclusion that it is only the portions convex to the origin that can be regarded as possessing any importance, since the others are essentially unobservable. They can be detected only by the discontinuities that may occur in demand with variation in price-ratios, leading to an abrupt jumping of a point of tangency across a chasm when the straight line is rotated. But, while such discontinuities may reveal the existence of chasms, they can never measure their depth. The concave portions of the indifference curves and their many-dimensional generalizations, if they exist, must forever remain in unmeasurable obscurity.
The difficulties of studying non-convex preferences were emphasized by Herman Wold and again by Paul Samuelson, who wrote that non-convexities are "shrouded in eternal darkness ...", according to Diewert.
Nonetheless, non-convex preferences were illuminated from 1959 to 1961 by a sequence of papers in The Journal of Political Economy (JPE). The main contributors were Farrell, Bator, Koopmans, and Rothenberg. In particular, Rothenberg's paper discussed the approximate convexity of sums of non-convex sets. These JPE-papers stimulated a paper by Lloyd Shapley and Martin Shubik, which considered convexified consumer-preferences and introduced the concept of an "approximate equilibrium". The JPE-papers and the Shapley–Shubik paper influenced another notion of "quasi-equilibria", due to Robert Aumann.
Starr's 1969 paper and contemporary economics
Previous publications on non-convexity and economics were collected in an annotated bibliography by Kenneth Arrow. He gave the bibliography to Starr, who was then an undergraduate enrolled in Arrow's (graduate) advanced mathematical-economics course. In his term-paper, Starr studied the general equilibria of an artificial economy in which non-convex preferences were replaced by their convex hulls. In the convexified economy, at each price, the aggregate demand was the sum of convex hulls of the consumers' demands. Starr's ideas interested the mathematicians Lloyd Shapley and Jon Folkman, who proved their eponymous lemma and theorem in "private correspondence", which was reported by Starr's published paper of 1969.
In his 1969 publication, Starr applied the Shapley–Folkman–Starr theorem. Starr proved that the "convexified" economy has general equilibria that can be closely approximated by "quasi-equilibria" of the original economy, when the number of agents exceeds the dimension of the goods: Concretely, Starr proved that there exists at least one quasi-equilibrium of prices popt with the following properties:
Starr established that
"in the aggregate, the discrepancy between an allocation in the fictitious economy generated by [taking the convex hulls of all of the consumption and production sets] and some allocation in the real economy is bounded in a way that is independent of the number of economic agents. Therefore, the average agent experiences a deviation from intended actions that vanishes in significance as the number of agents goes to infinity".
Following Starr's 1969 paper, the Shapley–Folkman–Starr results have been widely used in economic theory. Roger Guesnerie summarized their economic implications: "Some key results obtained under the convexity assumption remain (approximately) relevant in circumstances where convexity fails. For example, in economies with a large consumption side, preference nonconvexities do not destroy the standard results". "The derivation of these results in general form has been one of the major achievements of postwar economic theory", wrote Guesnerie. The topic of non-convex sets in economics has been studied by many Nobel laureates: Arrow (1972), Robert Aumann (2005), Gérard Debreu (1983), Tjalling Koopmans (1975), Paul Krugman (2008), and Paul Samuelson (1970); the complementary topic of convex sets in economics has been emphasized by these laureates, along with Leonid Hurwicz, Leonid Kantorovich (1975), and Robert Solow (1987). The Shapley–Folkman–Starr results have been featured in the economics literature: in microeconomics, in general-equilibrium theory, in public economics (including market failures), as well as in game theory, in mathematical economics, and in applied mathematics (for economists). The Shapley–Folkman–Starr results have also influenced economics research using measure and integration theory.
Mathematical optimization
The Shapley–Folkman lemma has been used to explain why large minimization problems with non-convexities can be nearly solved (with iterative methods whose convergence proofs are stated for only convex problems). The Shapley–Folkman lemma has encouraged the use of methods of convex minimization on other applications with sums of many functions.
Preliminaries of optimization theory
Nonlinear optimization relies on the following definitions for functions:
For example, the quadratic function f(x) = x2 is convex, as is the absolute value function g(x) = |x|. However, the sine function (pictured) is non-convex on the interval (0, π).
Additive optimization problems
In many optimization problems, the objective function f is separable: that is, f is the sum of many summand-functions, each of which has its own argument:
f(x) = f( (x1, ..., xN) ) = ∑ fn(xn).For example, problems of linear optimization are separable. Given a separable problem with an optimal solution, we fix an optimal solution
xmin = (x1, ..., xN)minwith the minimum value f(xmin). For this separable problem, we also consider an optimal solution (xmin, f(xmin) ) to the "convexified problem", where convex hulls are taken of the graphs of the summand functions. Such an optimal solution is the limit of a sequence of points in the convexified problem
(xj, f(xj) ) ∈ ∑ Conv (Graph( fn ) ).Of course, the given optimal-point is a sum of points in the graphs of the original summands and of a small number of convexified summands, by the Shapley–Folkman lemma.
This analysis was published by Ivar Ekeland in 1974 to explain the apparent convexity of separable problems with many summands, despite the non-convexity of the summand problems. In 1973, the young mathematician Claude Lemaréchal was surprised by his success with convex minimization methods on problems that were known to be non-convex; for minimizing nonlinear problems, a solution of the dual problem problem need not provide useful information for solving the primal problem, unless the primal problem be convex and satisfy a constraint qualification. Lemaréchal's problem was additively separable, and each summand function was non-convex; nonetheless, a solution to the dual problem provided a close approximation to the primal problem's optimal value. Ekeland's analysis explained the success of methods of convex minimization on large and separable problems, despite the non-convexities of the summand functions. Ekeland and later authors argued that additive separability produced an approximately convex aggregate problem, even though the summand functions were non-convex. The crucial step in these publications is the use of the Shapley–Folkman lemma. The Shapley–Folkman lemma has encouraged the use of methods of convex minimization on other applications with sums of many functions.
Probability and measure theory
Convex sets are often studied with probability theory. Each point in the convex hull of a (non-empty) subset Q of a finite-dimensional space is the expected value of a simple random vector that takes its values in Q, as a consequence of Carathéodory's lemma. Thus, for a non-empty set Q, the collection of the expected values of the simple, Q-valued random vectors equals Q's convex hull; this equality implies that the Shapley–Folkman–Starr results are useful in probability theory. In the other direction, probability theory provides tools to examine convex sets generally and the Shapley–Folkman–Starr results specifically. The Shapley–Folkman–Starr results have been widely used in the probabilistic theory of random sets, for example, to prove a law of large numbers, a central limit theorem, and a large-deviations principle. These proofs of probabilistic limit theorems used the Shapley–Folkman–Starr results to avoid the assumption that all the random sets be convex.
A probability measure is a finite measure, and the Shapley–Folkman lemma has applications in non-probabilistic measure theory, such as the theories of volume and of vector measures. The Shapley–Folkman lemma enables a refinement of the Brunn–Minkowski inequality, which bounds the volume of sums in terms of the volumes of their summand-sets. The volume of a set is defined in terms of the Lebesgue measure, which is defined on subsets of Euclidean space. In advanced measure-theory, the Shapley–Folkman lemma has been used to prove Lyapunov's theorem, which states that the range of a vector measure is convex. Here, the traditional term "range" (alternatively, "image") is the set of values produced by the function. A vector measure is a vector-valued generalization of a measure; for example, if p1 and p2 are probability measures defined on the same measurable space, then the product function p1 p2 is a vector measure, where p1 p2 is defined for every event ω by
(p1 p2)(ω)=(p1(ω), p2(ω)).Lyapunov's theorem has been used in economics, in ("bang-bang") control theory, and in statistical theory. Lyapunov's theorem has been called a continuous counterpart of the Shapley–Folkman lemma, which has itself been called a discrete analogue of Lyapunov's theorem.