
 | ||
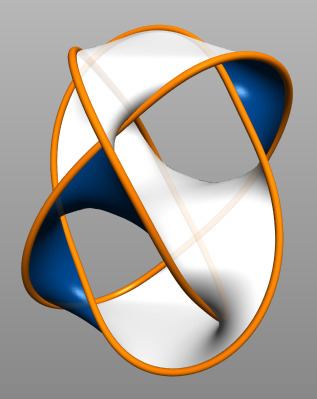
In mathematics, a Seifert surface (named after German mathematician Herbert Seifert) is a surface whose boundary is a given knot or link.
Contents
Such surfaces can be used to study the properties of the associated knot or link. For example, many knot invariants are most easily calculated using a Seifert surface. Seifert surfaces are also interesting in their own right, and the subject of considerable research.
Specifically, let L be a tame oriented knot or link in Euclidean 3-space (or in the 3-sphere). A Seifert surface is a compact, connected, oriented surface S embedded in 3-space whose boundary is L such that the orientation on L is just the induced orientation from S, and every connected component of S has non-empty boundary.
Note that any compact, connected, oriented surface with nonempty boundary in Euclidean 3-space is the Seifert surface associated to its boundary link. A single knot or link can have many different inequivalent Seifert surfaces. A Seifert surface must be oriented. It is possible to associate surfaces to knots which are not oriented nor orientable, as well.
Examples
The standard Möbius strip has the unknot for a boundary but is not considered to be a Seifert surface for the unknot because it is not orientable.
The "checkerboard" coloring of the usual minimal crossing projection of the trefoil knot gives a Mobius strip with three half twists. As with the previous example, this is not a Seifert surface as it is not orientable. Applying Seifert's algorithm to this diagram, as expected, does produce a Seifert surface; in this case, it is a punctured torus of genus g=1, and the Seifert matrix is
Existence and Seifert matrix
It is a theorem that any link always has an associated Seifert surface. This theorem was first published by Frankl and Pontrjagin in 1930. A different proof was published in 1934 by Herbert Seifert and relies on what is now called the Seifert algorithm. The algorithm produces a Seifert surface
Suppose that link has m components (m=1 for a knot), the diagram has d crossing points, and resolving the crossings (preserving the orientation of the knot) yields f circles. Then the surface
is the genus of
with
Q=(Q(ai,aj))the direct sum of g copies of
The 2g
where V*=(v(j,i)) the transpose matrix. Every integer 2g
The Alexander polynomial is computed from the Seifert matrix by
The signature of a knot is the signature of the symmetric Seifert matrix
Genus of a knot
Seifert surfaces are not at all unique: a Seifert surface S of genus g and Seifert matrix V can be modified by a topological surgery; in order to be replaced by a Seifert surface S' of genus g+1 and Seifert matrix
V'=VThe genus of a knot K is the knot invariant defined by the minimal genus g of a Seifert surface for K.
For instance:
A fundamental property of the genus is that it is additive with respect to the knot sum:
In general, the genus of a knot is difficult to compute, and the Seifert algorithm usually does not produce a Seifert surface of least genus. For this reason other related invariants are sometimes useful. The canonical genus