
Type Humanoid | Year of creation 2013 Website roboy.org | |
 | ||
Roboy is an advanced humanoid robot that was developed at the Artificial Intelligence Laboratory of the University of Zurich, and was publicly presented on March 8, 2013. Originally designed to emulate humans with the future possibility of helping out in daily environments, Roboy is a project that has involved both engineers and scientists. Initiated in 2012 by Pascal Kaufmann, Roboy is the work of engineers who designed him according to design principles developed by Prof. Dr. Rolf Pfeifer, the AI lab director, in conjunction with the assistance of other development partners. Both the team members and the partners of the Roboy project share a commitment toward continued research in the area of soft robotics. Later Roboy was moved to Munich, Germany, where Rafael Hostettler conducts research on it at the Technical University.
Contents
ECCE Robot
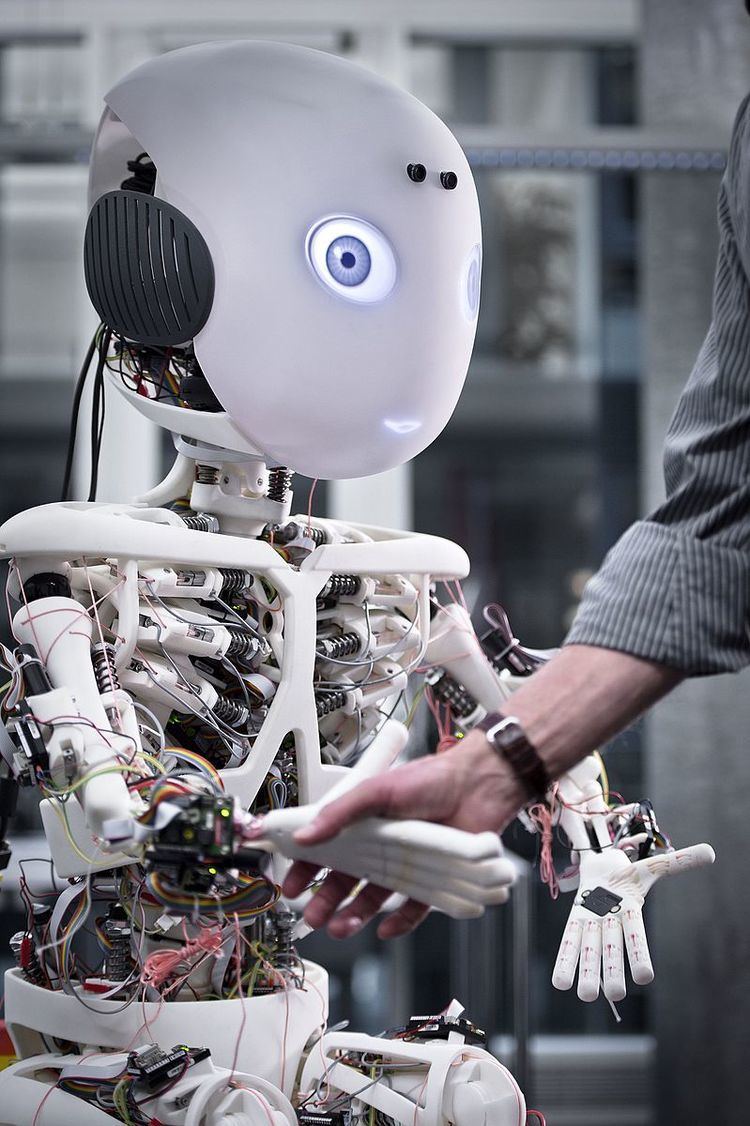
In general, standard humanoid robots mimic the human form, but the mechanisms used in them are very different from those that are in humans. The characteristics of these robots consequently reflect this difference. This places severe limitations on the kinds of interactions standard robots can engage in, the knowledge they can acquire of their environment, and thus on the nature of their cognitive engagement with the environment. Therefore, in 2011, a robotic project was launched in the European Union and it resulted in the development of the ECCE robot. Led by Professor Owen Holland of the University of Sussex, the ECCE project developed a new kind of robot that was modeled after the human anatomy. ECCE stands for Embodied Cognition in a Compliantly Engineered Robot, and the goal of the project was to develop an anthropomimetic robot whose body moves and interacts with the physical world in the same way flesh human bodies do. As athropomimetic, the robot copies not only the outward shape or form of a human body, but also copies the inner structures and mechanisms, such as bones, joints, muscles, and tendons. With these humanlike mechanisms the robot has the potential for human-like action and interaction in the world.
Project objectives:
The ECCE robot became a research platform. It uses many cables with a certain degree of elasticity to act as muscles and tendons. Like in a human body, all of the muscles and tendons need to be coordinated in order to get meaningful movement. To achieve this, there are 45 motors embedded in the robotic body that pull on the cables to make the body move. This allows the robot to have better potential to work in an unstructured human environment than a typical robot. The idea was to outsource the computation for the mechanics of the human body, like using passive compliance to make it absorb the energy in the right way to allow for safe interactions and to store energy in the muscles that can then be released to produce fast movements.
Development
With ECCE as its starting point, Roboy was conceived in 2011 via project coordination between research institutions and industry partners. One of their first breakthroughs was the anthropomorphic tendon-driven arm (ANTHROB), which served as example for how the rest of Roboy's body should function.
At 1.2 m (3.9 ft), Roboy was designed to have the appearance of a child and to one day be used as a helper robot for the sick and elderly. Unlike more traditional robots, which have motors in their joints, Roboy is tendon-driven, allowing for more fluent, human-like movements. The walking movements of humans were acutely studied and then tweaked to result in a walking behavior similar to that of a human being. The anatomy of Roboy is very similar to the human anatomy. The spine consists of many vertebras connected by cords and balls to represent the spinal cord. As for the head and face of Roboy, it was designed completely from scratch and the community on Facebook collaborated to decide which head was the most liked. Further, Brain technology and Artificial Intelligence software which run the brain of Roboy can allow him to blush in certain situations, such as after receiving a compliment or while being hugged. In 2013, Roboy was to be presented at the "Robots on Tour" robotic fair that took place in Zurich, Switzerland on March 8. In order to achieve this, the development team had to finish the entire project in 9 months. This was made possible by means of crowdfunding. In return, all of the contributors' names were engraved on Roboy itself. The development of Roboy Junior, i.e. mechanic and software, was conducted Open source. Therefore, all the expertise, ideas, and inventions were not provided by just one specific entity so anyone had the chance to contribute to the technology. Today, Roboy Junior is meant to be an initial spark to trigger the work towards a generic anthropomimetic research platform.
Technical Specifications
Degrees of Freedom / Motors
Myorobotics
There is a close collaboration between Roboy and the ongoing EU Research Project Myorobotics. The “muscles” of Roboy are modular, and replicated throughout his body. Myorobotics is taking this idea further, developing bone and joint modules as well in order to create a robotics toolkit for tendon driven robots that can be designed, simulated, optimized and controlled in one coherent framework.
The Human Brain Project
In the European Union 1 Billion € flagship Human Brain Project, simulated brains are being built. The Roboy team, in close collaboration with the head of the Neurorobotics part of the project, Prof. Alois Knoll from the Technical University of Munich, provides a basis for the robots to be used in the project. Muscolo-skeletal systems are natural partners for brains as they evolved together. Their goals are to find insights on how to control complex soft robots and also to bring virtual brains into physical reality.
The University of Melbourne
The robotics research group at the University of Melbourne has a strong theoretical background in controlling muscle-like tendon-driven systems. In a close collaboration with Dr. Darwin Lau and Dr. Denny Oetomo, the Roboy team provides them with their hardware, while in return their knowledge is being transferred into the software, improving the control and ability of Roboy.
Roboy at school
"Roboy at school" is an initiative of the Roboy team that was founded in order to spark the interest of teenagers in the natural sciences.