
 | ||
A rapidly exploring random tree (RRT) is an algorithm designed to efficiently search nonconvex, high-dimensional spaces by randomly building a space-filling tree. The tree is constructed incrementally from samples drawn randomly from the search space and is inherently biased to grow towards large unsearched areas of the problem. RRTs were developed by Steven M. LaValle and James J. Kuffner Jr. . They easily handle problems with obstacles and differential constraints (nonholonomic and kinodynamic) and have been widely used in autonomous robotic motion planning.
Contents
RRTs can be viewed as a technique to generate open-loop trajectories for nonlinear systems with state constraints. An RRT can also be considered as a Monte-Carlo method to bias search into the largest Voronoi regions of a graph in a configuration space. Some variations can even be considered stochastic fractals.
Description
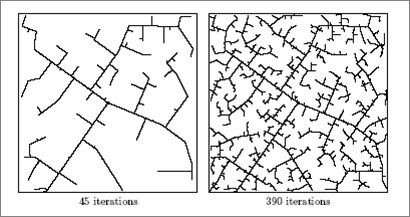
An RRT grows a tree rooted at the starting configuration by using random samples from the search space. As each sample is drawn, a connection is attempted between it and the nearest state in the tree. If the connection is feasible (passes entirely through free space and obeys any constraints), this results in the addition of the new state to the tree. With uniform sampling of the search space, the probability of expanding an existing state is proportional to the size of its Voronoi region. As the largest Voronoi regions belong to the states on the frontier of the search, this means that the tree preferentially expands towards large unsearched areas.
The length of the connection between the tree and a new state is frequently limited by a growth factor. If the random sample is further from its nearest state in the tree than this limit allows, a new state at the maximum distance from the tree along the line to the random sample is used instead of the random sample itself. The random samples can then be viewed as controlling the direction of the tree growth while the growth factor determines its rate. This maintains the space-filling bias of the RRT while limiting the size of the incremental growth.
RRT growth can be biased by increasing the probability of sampling states from a specific area. Most practical implementations of RRTs make use of this to guide the search towards the planning problem goals. This is accomplished by introducing a small probability of sampling the goal to the state sampling procedure. The higher this probability, the more greedily the tree grows towards the goal.
Algorithm
For a general configuration space C, the algorithm in pseudocode is as follows:
In the algorithm above, "RAND_CONF" grabs a random configuration qrand in C. This may be replaced with a function "RAND_FREE_CONF" that uses samples in Cfree, while rejecting those in Cobs using some collision detection algorithm.
"NEAREST_VERTEX" is a function that runs through all vertices v in graph G, calculates the distance between qrand and v using some measurement function thereby returning the nearest vertex.
"NEW_CONF" selects a new configuration qnew by moving an incremental distance Δq from qnear in the direction of qrand. (According to in holonomic problems, this should be omitted and qrand used instead of qnew.)
Variants and improvements for motion planning
It has been shown that, under 'mild technical conditions', the cost of the best path in the RRT converges almost surely to a non-optimal value. For that reason, it is desirable to find variants of the RRT that converges to the optimum: