
 | ||
Polar moment of inertia is a quantity used to predict an object's ability to resist torsion, in objects (or segments of objects) with an invariant circular cross section and no significant warping or out-of-plane deformation. It is used to calculate the angular displacement of an object subjected to a torque. It is analogous to the area moment of inertia, which characterizes an object's ability to resist bending and is required to calculate displacement.
Contents
- Limitations
- Definition
- Unit
- Conversion from Area Moment of Inertia
- Application
- Sample calculation
- Polar moment of inertia
- References
The larger the polar moment of area, the less the beam will twist, when subjected to a given torque.
Polar moment of area should not be confused with moment of inertia, which characterizes an object's angular acceleration due to a torque. See moment (physics).
Note: It has become common to use "Moment of Inertia" (MOI) to refer to either or both of the planar second moment of area,Limitations
The polar moment of area cannot be used to analyze shafts with non-circular cross-sections. In such cases, the torsion constant can be substituted instead.
In objects with significant cross-sectional variation(along the axis of the applied torque), which cannot be analyzed in segments, a more complex approach may have to be used. See 3-D elasticity.
However the polar moment of area can be used to calculate the moment of inertia of an object with arbitrary cross-section.
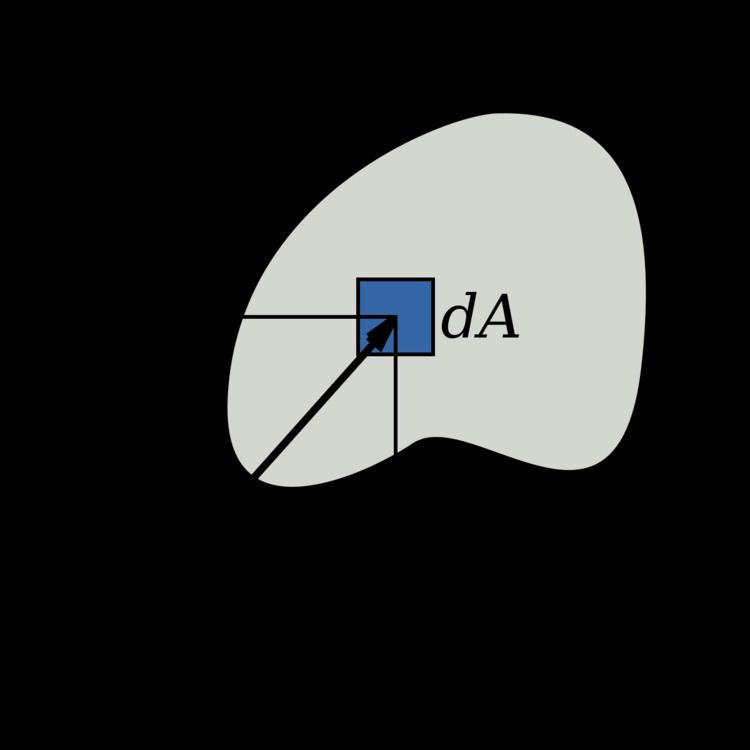
Definition
For a circular section with radius r:
Unit
The SI unit for polar moment of area, like the area moment of inertia, is metre to the fourth power (m4).
Conversion from Area Moment of Inertia
By the perpendicular axis theorem, the following equation relates Iz to the area moments of inertia about the other two mutually perpendicular axes:
Application
NOTE: The following is only true for a circular or hollow circular section.
The polar moment of area appears in the formulae that describe torsional stress and angular displacement.
Torsional stress:
where
In a circular shaft, the shear stress is maximal at the surface of the shaft.
Sample calculation
Calculation of the steam turbine shaft radius for a turboset:
Assumptions:
The angular frequency can be calculated with the following formula:
The torque carried by the shaft is related to the power by the following equation:
The angular frequency is therefore 314.16 rad/s and the torque 3.1831 x 106 N·m.
The maximal torque is:
After substitution of the polar moment of inertia the following expression is obtained:
The radius is 0.200 m. If one adds a factor of safety of 5 and re-calculates the radius with the maximal stress equal to the yield stress/5 the result is a radius of 0.343 m, or a diameter of 69 cm, the approximate size of a turboset shaft in a nuclear power plant.
Polar moment of inertia
Hollow cylinder
Moment of inertia
Solid Cylinder
Moment of inertia
where: