
 | ||
In non-Euclidean geometry, the Poincaré half-plane model is the upper half-plane, denoted below as H
Contents
- Metric
- Distance calculation
- Special points and curves
- Euclidean synopsis
- Compass and straightedge constructions
- Creating the line through two existing points
- Creating the circle through one point with center another point
- Given a circle find its hyperbolic center
- Other constructions
- Symmetry groups
- Isometric symmetry
- Geodesics
- The model in three dimensions
- The model in n dimensions
- References
Equivalently the Poincaré half-plane model is sometimes described as a complex plane where the imaginary part (the y coordinate mentioned above) is positive.
The Poincaré half-plane model is named after Henri Poincaré, but it originated with Eugenio Beltrami, who used it, along with the Klein model and the Poincaré disk model (due to Riemann), to show that hyperbolic geometry was equiconsistent with Euclidean geometry.
This model is conformal which means that the angles measured at a point are the same in the model as they are in the actual hyperbolic plane.
The Cayley transform provides an isometry between the half-plane model and the Poincaré disk model.
This model can be generalized to model an n+1 dimensional hyperbolic space by replacing the real number x by a vector in an n dimensional Euclidean vector space.
Metric
The metric of the model on the half-plane
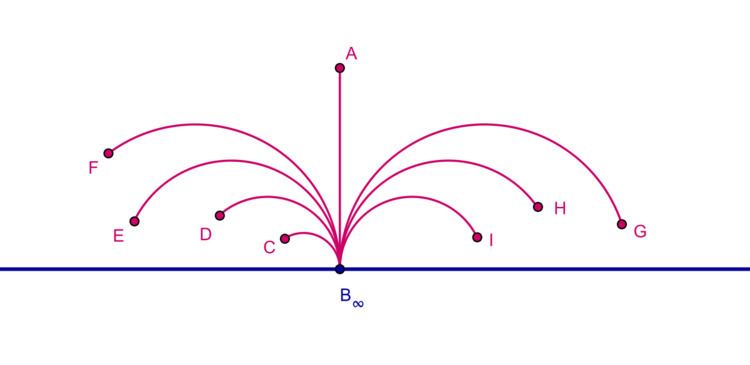
where s measures the length along a (possibly curved) line. The straight lines in the hyperbolic plane (geodesics for this metric tensor, i.e. curves which minimize the distance) are represented in this model by circular arcs perpendicular to the x-axis (half-circles whose origin is on the x-axis) and straight vertical rays perpendicular to the x-axis.
Distance calculation
In general, the distance between two points measured in this metric along such a geodesic is:
Some special cases can be simplified:
where arcosh and arsinh are inverse hyperbolic functions
Another way to calculate the distance between two points that are on an (Euclidean) half circle is:
where
Special points and curves
Euclidean synopsis
A Euclidean circle with center
Compass and straightedge constructions
Here is how one can use compass and straightedge constructions in the model to achieve the effect of the basic constructions in the hyperbolic plane. For example, how to construct the half-circle in the Euclidean half-plane which models a line on the hyperbolic plane through two given points.
Creating the line through two existing points
Draw the line segment between the two points. Construct the perpendicular bisector of the line segment. Find its intersection with the x-axis. Draw the circle around the intersection which passes through the given points. Erase the part which is on or below the x-axis.
Or in the special case where the two given points lie on a vertical line, draw that vertical line through the two points and erase the part which is on or below the x-axis.
Creating the circle through one point with center another point
Draw the radial line (half-circle) between the two given points as in the previous case. Construct a tangent to that line at the non-central point. Drop a perpendicular from the given center point to the x-axis. Find the intersection of these two lines to get the center of the model circle. Draw the model circle around that new center and passing through the given non-central point.
Draw a circle around the intersection of the vertical line and the x-axis which passes through the given central point. Draw a horizontal line through the non-central point. Construct the tangent to the circle at its intersection with that horizontal line.
The midpoint between the intersection of the tangent with the vertical line and the given non-central point is the center of the model circle. Draw the model circle around that new center and passing through the given non-central point.
Draw a circle around the intersection of the vertical line and the x-axis which passes through the given central point. Draw a line tangent to the circle which passes through the given non-central point. Draw a horizontal line through that point of tangency and find its intersection with the vertical line.
The midpoint between that intersection and the given non-central point is the center of the model circle. Draw the model circle around that new center and passing through the given non-central point.
Given a circle find its (hyperbolic) center
Drop a perpendicular p from the Euclidean center of the circle to the x-axis.
Let point q be the intersection of this line and the x- axis.
Draw a line tangent to the circle going through q.
Draw the half circle h with center q going through the point where the tangent and the circle meet.
The (hyperbolic) center is the point where h and p intersect.
Other constructions
Find the intersection of the two given semicircles (or vertical lines).
Find the intersection of the given semicircle (or vertical line) with the given circle.
Find the intersection of the two given circles.
Symmetry groups
The projective linear group PGL(2,C) acts on the Riemann sphere by the Möbius transformations. The subgroup that maps the upper half-plane, H, onto itself is PSL(2,R), the transforms with real coefficients, and these act transitively and isometrically on the upper half-plane, making it a homogeneous space.
There are four closely related Lie groups that act on the upper half-plane by fractional linear transformations and preserve the hyperbolic distance.
The relationship of these groups to the Poincaré model is as follows:
Important subgroups of the isometry group are the Fuchsian groups.
One also frequently sees the modular group SL(2,Z). This group is important in two ways. First, it is a symmetry group of the square 2x2 lattice of points. Thus, functions that are periodic on a square grid, such as modular forms and elliptic functions, will thus inherit an SL(2,Z) symmetry from the grid. Second, SL(2,Z) is of course a subgroup of SL(2,R), and thus has a hyperbolic behavior embedded in it. In particular, SL(2,Z) can be used to tessellate the hyperbolic plane into cells of equal (Poincaré) area.
Isometric symmetry
The group action of the projective special linear group PSL(2,R) on H is defined by
Note that the action is transitive, in that for any
The stabilizer or isotropy subgroup of an element z in H is the set of
Since any element z in H is mapped to i by some element of PSL(2,R), this means that the isotropy subgroup of any z is isomorphic to SO(2). Thus, H = PSL(2,R)/SO(2). Alternatively, the bundle of unit-length tangent vectors on the upper half-plane, called the unit tangent bundle, is isomorphic to PSL(2,R).
The upper half-plane is tessellated into free regular sets by the modular group SL(2,Z).
Geodesics
The geodesics for this metric tensor are circular arcs perpendicular to the real axis (half-circles whose origin is on the real axis) and straight vertical lines ending on the real axis.
The unit-speed geodesic going up vertically, through the point i is given by
Because PSL(2,R) acts transitively by isometries of the upper half-plane, this geodesic is mapped into the other geodesics through the action of PSL(2,R). Thus, the general unit-speed geodesic is given by
This provides the complete description of the geodesic flow on the unit-length tangent bundle (complex line bundle) on the upper half-plane.
The model in three dimensions
The metric of the model on the half- space
is given by
where s measures length along a possibly curved line. The straight lines in the hyperbolic space (geodesics for this metric tensor, i.e. curves which minimize the distance) are represented in this model by circular arcs normal to the z = 0-plane (half-circles whose origin is on the z = 0-plane) and straight vertical rays normal to the z = 0-plane.
The distance between two points measured in this metric along such a geodesic is:
The model in n dimensions
This model can be generalized to model an n+1 dimensional hyperbolic space by replacing the real number x by a vector in an n dimensional Euclidean vector space.