
 | ||
The Plücker matrix is a special skew-symmetric 4 × 4 matrix, which characterizes a straight line in projective space. The matrix is defined by 6 Plücker coordinates with 4 degrees of freedom. It is named after the German mathematician Julius Plücker.
Contents
Definition
A straight line in space is defined by two distinct points
Where the skew-symmetric
with
Plücker coordinates fulfill the Graßmann–Plücker relations
and are defined up to scale. A Plücker matrix has only rank 2 and four degrees of freedom (just like lines in
Properties
The Plücker matrix allows us to express the following geometric operations as matrix-vector product:
Uniqueness
Two arbitrary distinct points on the line can be written as a linear combination of
Their Plücker matrix is thus:
up to scale identical to
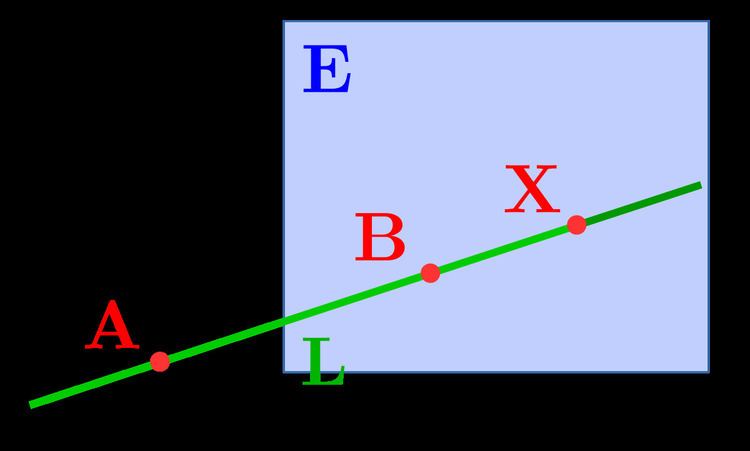
Intersection with a plane
Let
which does not contain the line
which lies on the line
and must therefore be their point of intersection.
In addition, the product of the Plücker matrix with a plane is the zero-vector, exactly if the line
Dual Plücker matrix
In projective three-space, both points and planes have the same representation as 4-vectors and the algebraic description of their geometric relationship (point lies on plane) is symmetric. By interchanging the terms plane and point in a theorem, one obtains a dual theorem which is also true.
In case of the Plücker matrix, there exists a dual representation of the line in space as the intersection of two planes:
and
in homogeneous coordinates of projective space. Their Plücker matrix is:
and
describes the plane
Relationship between primal and dual Plücker matrices
As the vector
Thus:
The following product fulfills these properties:
due to the Graßmann–Plücker relation. With the uniqueness of Plücker matrices up to scalar multiples, for the primal Plücker coordinates
we obtain the following dual Plücker coordinates:
In the projective plane
The 'join' of two points in the projective plane is the operation of connecting two points with a straight line. Its line equation can be computed using the cross product:
Dually, one can express the 'meet', or intersection of two straight lines by the cross-product:
The relationship to Plücker matrices becomes evident, if one writes the cross product as a matrix-vector product with a skew-symmetric matrix:
and analogously
Geometric interpretation
Let
where