
 | ||
The terms hold-in range, pull-in range (acquisition range), and lock-in range are widely used by engineers for the concepts of frequency deviation ranges within which phase-locked loop-based circuits can achieve lock under various additional conditions.
Contents
History
In the classic books on phase-locked loops, published in 1966, such concepts as hold-in, pull-in, lock-in, and other frequency ranges for which PLL can achieve lock, were introduced. They are widely used nowadays (see, e.g. contemporary engineering literature and other publications). Usually in engineering literature only non-strict definitions are given for these concepts. F. Gardner in 1979 in the 2nd edition of his well-known work, Phaselock Techniques, formulated the following problem [p. 70] (see also the 3rd edition [p. 187-188]): "There is no natural way to define exactly any unique lock-in frequency". The lack of rigorous explanations led to the paradox: "despite its vague reality, lock-in range is a useful concept" [p. 70]. Many years of using definitions based on the above concepts has led to the advice given in a handbook on synchronization and communications, namely to check the definitions carefully before using them. First rigorous mathematical definitions were given in.
Definitions
Note that in general
Locked state
Definition of locked state
In a locked state: 1) the phase error fluctuations are small, the frequency error is small; 2) PLL approaches the same locked state after small perturbations of the phases and filter state.
Hold-in range
Definition of hold-in range.
A largest interval of frequency deviations
Value of frequency deviation belongs to the hold-in range if the loop re-achieves locked state after small perturbations of the filter's state, the phases and frequencies of VCO and the input signals. This effect is also called steady-state stability. In addition, for a frequency deviation within the hold-in range, after a small changes in input frequency loop re-achieves a new locked state (tracking process).
Pull-in range
Also called acquisition range, capture range.
Assume that the loop power supply is initially switched off and then at
Definition of pull-in range.
Pull-in range is a largest interval of frequency deviations
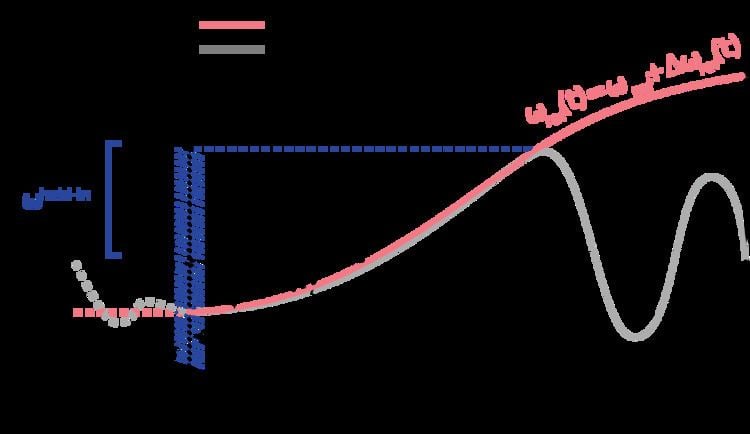
Lock-in range
Assume that PLL is initially locked. Then the reference frequency
If difference between initial and final phase deviation is larger than
Here, sometimes, the limit of the difference or the maximum of the difference is considered
Definition of lock-in range.
If the loop is in a locked state, then after an abrupt change of