
 | ||
In orbital mechanics, Kepler's equation relates various geometric properties of the orbit of a body subject to a central force.
Contents
- Equation
- Alternate forms
- Hyperbolic Kepler equation
- Radial Kepler equation
- Inverse problem
- Inverse Kepler equation
- Algorithm for the inverse Kepler equation
- Inverse radial Kepler equation
- Numerical approximation of inverse problem
- References
It was first derived by Johannes Kepler in 1609 in Chapter 60 of his Astronomia nova, and in book V of his Epitome of Copernican Astronomy (1621) Kepler proposed an iterative solution to the equation. The equation has played an important role in the history of both physics and mathematics, particularly classical celestial mechanics.
Equation
Kepler's equation is
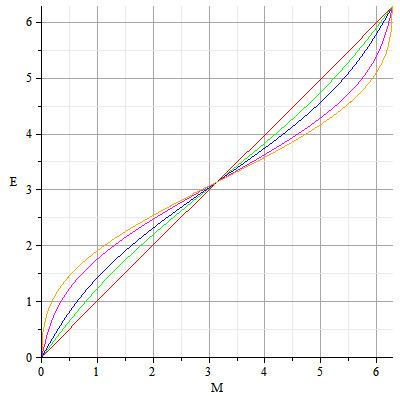
where M is the mean anomaly, E is the eccentric anomaly, and e is the eccentricity.
The 'eccentric anomaly' E is useful to compute the position of a point moving in a Keplerian orbit. As for instance, if the body passes the periastron at coordinates x = a(1 − e), y = 0, at time t = t0, then to find out the position of the body at any time, you first calculate the mean anomaly M from the time and the mean motion n by the formula M = n(t − t0), then solve the Kepler equation above to get E, then get the coordinates from:
Kepler's equation is a transcendental equation because sine is a transcendental function, meaning it cannot be solved for E algebraically. Numerical analysis and series expansions are generally required to evaluate E.
Alternate forms
There are several forms of Kepler's equation. Each form is associated with a specific type of orbit. The standard Kepler equation is used for elliptic orbits (0 ≤ e < 1). The hyperbolic Kepler equation is used for hyperbolic orbits (e ≫ 1). The radial Kepler equation is used for linear (radial) orbits (e = 1). Barker's equation is used for parabolic orbits (e = 1). When e = 1, Kepler's equation is not associated with an orbit.
When e = 0, the orbit is circular. Increasing e causes the circle to flatten into an ellipse. When e = 1, the orbit is completely flat, and it appears to be either a segment if the orbit is closed, or a ray if the orbit is open. An infinitesimal increase to e results in a hyperbolic orbit with a turning angle of 180 degrees, and the orbit appears to be a ray. Further increases reduce the turning angle, and as e goes to infinity, the orbit becomes a straight line of infinite length.
Hyperbolic Kepler equation
The Hyperbolic Kepler equation is:
where H is the hyperbolic eccentric anomaly. This equation is derived by multiplying Kepler's equation by the square root of −1; i = √−1 for imaginary unit, and replacing
to obtain
Radial Kepler equation
The Radial Kepler equation is:
where t is time, and x is the distance along an x-axis. This equation is derived by multiplying Kepler's equation by 1/2 making the replacement
and setting e = 1 gives
Inverse problem
Calculating M for a given value of E is straightforward. However, solving for E when M is given can be considerably more challenging.
Kepler's equation can be solved for E analytically by Lagrange inversion. The solution of Kepler's equation given by two Taylor series below.
Confusion over the solvability of Kepler's equation has persisted in the literature for four centuries. Kepler himself expressed doubt at the possibility of finding a general solution.
Inverse Kepler equation
The inverse Kepler equation is the solution of Kepler's equation for all real values of
Evaluating this yields:
These series can be reproduced in Mathematica with the InverseSeries operation.
InverseSeries[Series[M - Sin[M], {M, 0, 10}]]InverseSeries[Series[M - e Sin[M], {M, 0, 10}]]These functions are simple Taylor series. Taylor series representations of transcendental functions are considered to be definitions of those functions. Therefore, this solution is a formal definition of the inverse Kepler equation. While this solution is the simplest in a certain mathematical sense, for values of
The solution for e ≠ 1 was discovered by Karl Stumpff in 1968, but its significance wasn't recognized.
Algorithm for the inverse Kepler equation
Note that
The number of iterations,
Using Newton's method to find the zero of
to first order in the small quantities
The algorithm actually uses a simplified version of Newton's method to improve on a value for E. Although Newton's method usually converges faster to the correct value for E there are situations where it requires division by 0 and the method above is then preferred.
Inverse radial Kepler equation
The inverse radial Kepler equation is:
Evaluating this yields:
To obtain this result using Mathematica:
InverseSeries[Series[ArcSin[Sqrt[t]] - Sqrt[(1 - t) t], {t, 0, 15}]]Numerical approximation of inverse problem
For most applications, the inverse problem can be computed numerically by finding the root of the function:
This can be done iteratively via Newton's method:
Note that E and M are in units of radians in this computation. This iteration is repeated until desired accuracy is obtained (e.g. when f(E) < desired accuracy). For most elliptical orbits an initial value of E0 = M(t) is sufficient. For orbits with e > 0.8, an initial value of E0 = π should be used. A similar approach can be used for the hyperbolic form of Kepler's equation. In the case of a parabolic trajectory, Barker's equation is used.