Year of creation 2005 | ||
 | ||
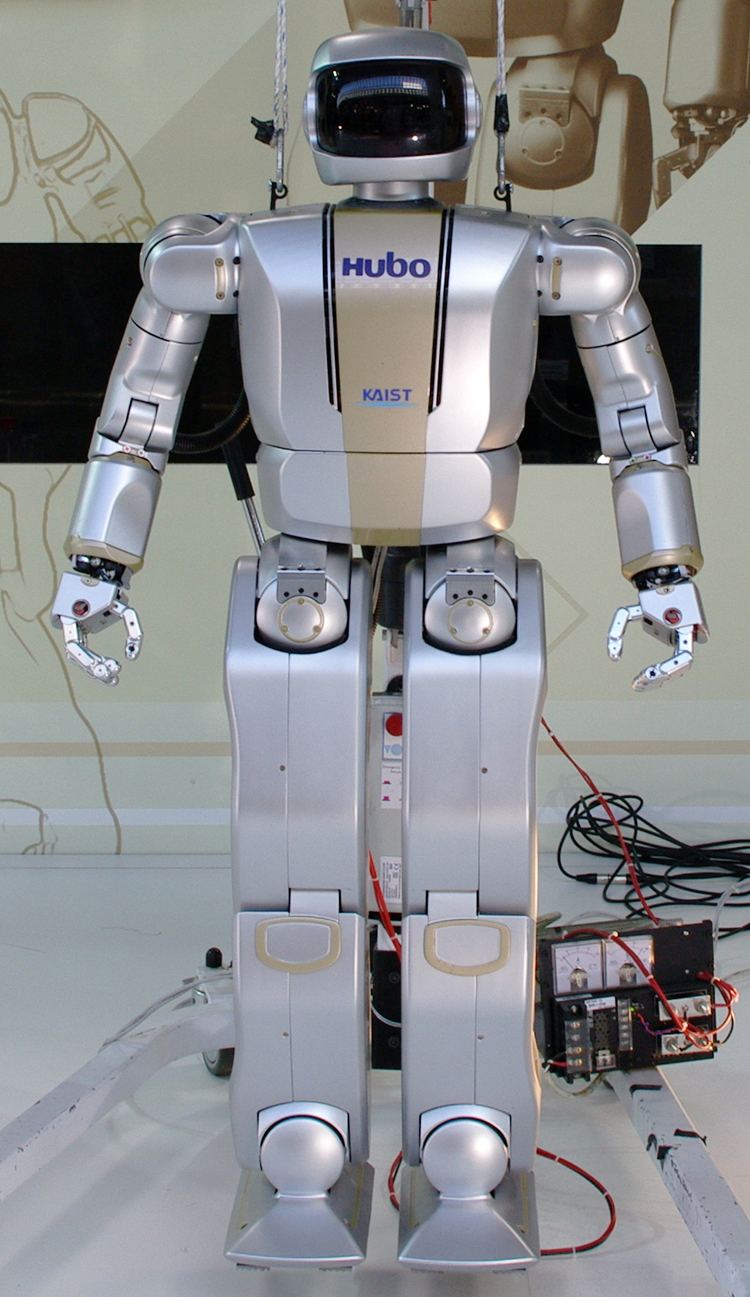
HUBO (Korean: 휴보; designated KHR-3) is a walking humanoid robot, head mounted on a life-size walking bipedal frame, developed by the Korea Advanced Institute of Science and Technology (KAIST) and released on January 6, 2005. According to Hubo's creator Prof Jun-Ho Oh and his Plenary Session at ICRA 2012 entitled Development Outline of the Humanoid Robot: HUBO II the name Hubo is short form for nothing, it is just Hubo.
Contents

Hubo has voice recognition and synthesis faculties, as well as sophisticated vision in which its two eyes move independently of one another.
Prototypes
Korea's history in robotics engineering is relatively short. KAIST only began research in 2000, led by professor Oh Jun-ho. The first prototype, KHR-0, consisting of two legs without an upper body was built in 2001. KHR-1 was developed without a head or hands released in 2003, followed by a complete humanoid KHR-2 in 2004.
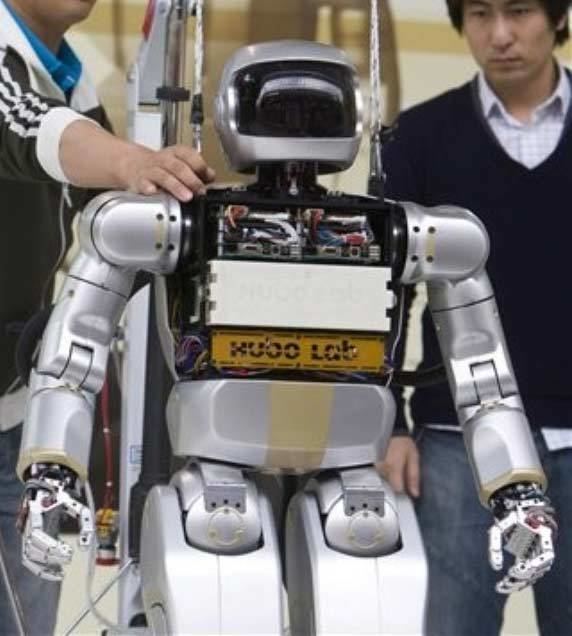
KHR-3 HUBO
On January 25, 2005, Gizmag reported on KAIST's unveiling of the KHR-3 HUBO.
The KHR-3's physical specifications, such as height, weight, and the number of DOFs (degrees of freedom), were similar to Honda's ASIMO, which served as the benchmark for the project. In terms of AI and movements, HUBO fell short of the "next-gen ASIMO," which was unveiled three months later. While HUBO could only walk at 1.25 km/h, the ASIMO could walk at 2.5 km/h and also run at 3 km/h. The ASIMO was also capable of walking up and down stairs, which was a temporary shortcoming for HUBO needing further development. KAIST researchers noted, however, that HUBO could play kai-bai-bo (the Korean version of rock-paper-scissors), which was impossible for ASIMO since its fingers could not move independently of each other.
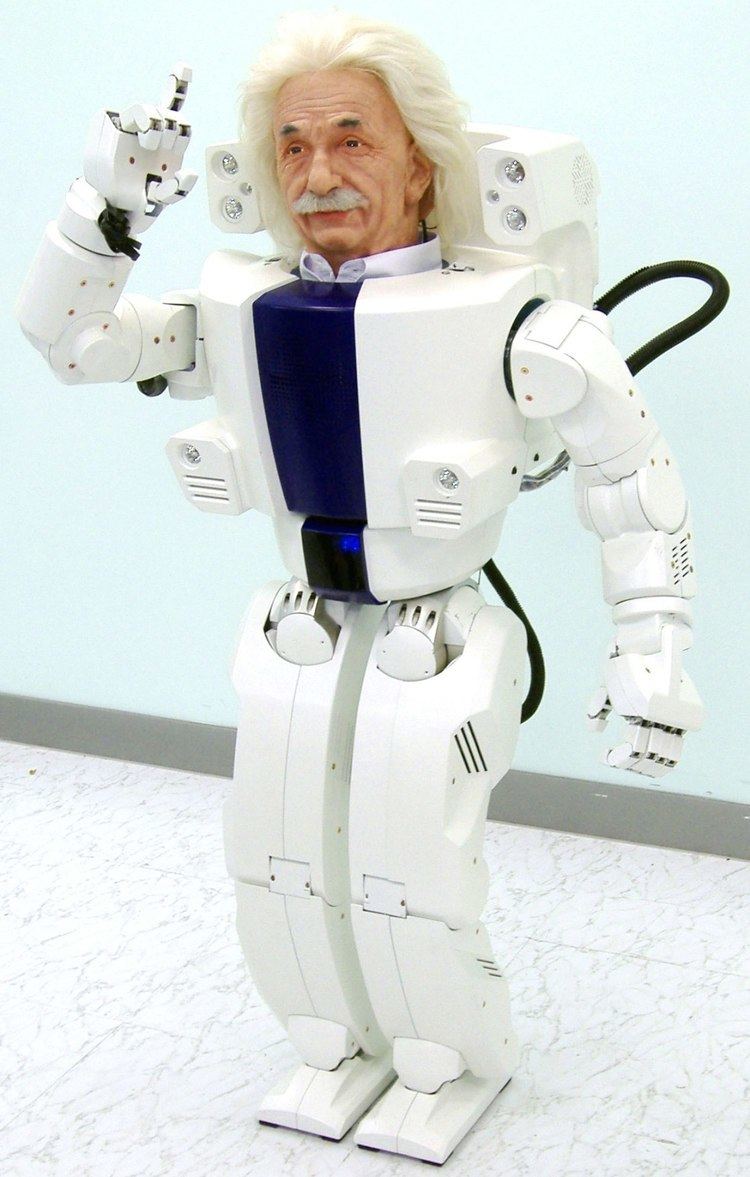
Albert Hubo
In November of '05, KAIST, Korea and Dallas, Texas based Hanson Robotics, Inc (HRI) released the world's first android head mounted on a life-size walking bi-pedal frame at the APEC Summit in Seoul, Korea. The walking frame was based on the KHR-3 HUBO, while the head was an exact recreation of the late physicist, Albert Einstein. The android was able to speak and cover a wide range of natural facial expressions, built upon prior HRI development on the Philip K. Dick android, which made its official debut at the Wired Magazine NextFest 05' in Chicago, Illinois.
The humanoid prototype was officially dubbed "Albert Einstein Hubo".
Jaemi HUBO / HUBO 2

Jaemi HUBO was developed from 2008 to 2009. The complete humanoid robot was given a slimmer design with an aluminum endoskeleton and a polycarbonate frame, resulting in a slightly taller height but a 20% lighter weight than its predecessors. Its movements were more realistic since the arms made quicker and more natural motions, and the legs could stretch to imitate human walking, which also consumes less energy than the traditional humanoid walking based on the Zero Moment Point trajectory. Its walking speed was improved to 1.5 km/h, and it also acquired the ability to run at 3.0 km/h (which is still much slower than the new ASIMO's 9 km/h by comparison).
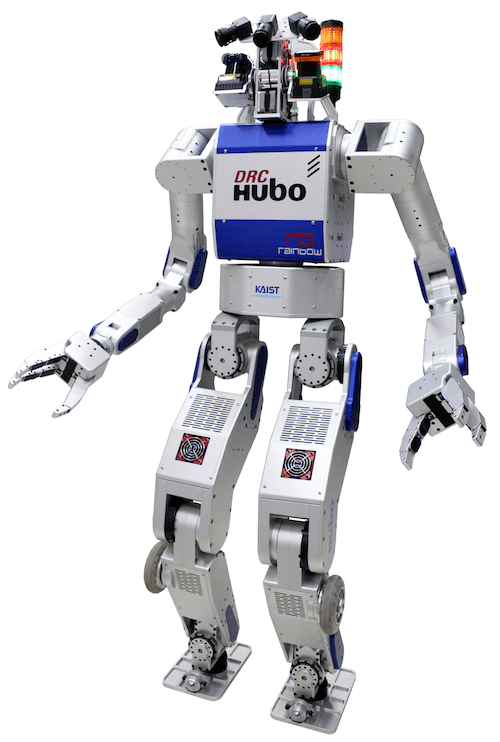
DARPA Robotics Challenge

A HUBO entered by TEAM KAIST was the winner of the DARPA Robotics Challenge finals on June 6, 2015. The machine, called DRC-Hubo, is an adaptable multifunctional device with the ability to transform from a walking robot to rolling on 4 wheels by bending and using wheels incorporated into its knees. One of the tasks was to climb stairs, which the DRC-Hubo was able to do by transforming into its walking posture.